Nic
-
Gesamte Inhalte
1.425 -
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von Nic
-
Android Tablet und Schrittmotor steuern
Thema antwortete auf Nics mchott in: Allgemeine Diskussionen
Prima, gibt es irgendwas zu beachten, wenn man den Adhoc- oder Direct-WIFI-Modus benutzen möchte ? Wie wird sowas in Windows eingestellt ? Im Mischbetrieb, also gleichzeitiger, aber getrennter Betrieb von Chibi und WLAN, brauche ich nur eine 2.IPConnection ? Da fällt mir noch ein Szenario ein: Wenn ich einen Stack aus z.B. Master/Stepper/PowerSupply per USB-Kabel mit dem PC verbunden habe, könnte ich gleichzeitig einen 2.Stack aus Master/WLAN/IO4 kabellos ansprechen ? Aber dann auch wieder nur über eine 2.IPConnection ? -
Android Tablet und Schrittmotor steuern
Thema antwortete auf Nics mchott in: Allgemeine Diskussionen
Mit der WIFI-Extension plus Master-Brick soll der BrickD Treiber obsolet sein, richtig, aber wenn ich TF richtig verstanden habe, braucht man zw. Android/Smartphone/PC und WIFI-Stack immer noch einen Router, also z.B. so eine zickige Fritzbox Direkt-WIFI wird noch nicht unterstützt ! http://www.tinkerunity.org/forum/index.php/topic,840.msg5656.html#msg5656 -
Raspery Pi an Step-Down-Powersupply an autobatterie
Thema antwortete auf Nics treaki in: Anfängerfragen und FAQ
Interressant, wo soll es denn hingehen ? Ev. würde ich Witterungseinflüsse, Temeraturschwankungen, Frost, hohe Feuchtigkeit bei Deinen Überlegeungen nicht vergessen, falls die Umgebung entsprechend rauh ist. Und ob, wie lange das System autonom arbeiten soll. Tiefe Temperaturen verkürzen die Kapazität auch bei Blei-Akkus, wenn ein schneller Wechsel nicht möglich ist, würde ich einen 2.Akku über eine Akku-Weiche (Conrad) dazuklemmen. Soll das ganze lange autark laufen, würde ich eher darüber nachdenken, ein Solarmodul mit Laderegler anzuschließen, der den Akku immmer wieder auflädt. So oder so ist es wichtig den Gesamtverbrauch des Systems aus Computer, USB- und TF-Teile zu ermitteln. Anderer Ansatz, je nach Verbrauch, 1 Akku für den TF-Stack oder USB-Teile, eine 2.Akku für den RaspPi. Ich würde zuerst mal schauen, ob es nicht über Adapter oder selbstgebasteltem Kabel lösbar ist, die TF-Platinen sind sehr klein, und empfindlich, da würde ich erst ran wenn alles andere nichts hilft. -
Wie immer trifft AuronX den Nagel auf den Kopf aber mit der Einschränkung und gem. der angeleierten Energiewende kein AKW, sondern "nur" ein strahlungarmer Akku-Pack von 5V (http://www.amazon.de/dp/B004BLRG7E)
-
Ich vermute mal bei dieser hohen Drehzahl ist der Motor am Ende seines Drehmoments angelangt und hat keine Lust mehr sich zu drehen Ich empfehle das Studieren des Datenblatts des Motors.
-
Den letzten Satz verstehe ich nicht, heißt das es kommt noch eine weitere Latenz dazu ? Wie schlägt sich das auf die Performance der Antwortzeiten im Vergleich zum Standardbetrieb nieder ? Ich denke hier an die zeitnahe Steuerung von Schrittmotoren etc. Nochmals meine Frage, die unbeantwortet blieb: Lässt sich das etwas besser spezifizieren, welche ca. Reichweite man mit den 3 versch. Antennengrößen für das WLAN-Ext unter idealen Bedingungen erreichen kann ? Noch ne Frage zur Stromversorgung: Lässt sich z.B. ein Stack aus Master/WLAN/IO4/Ambient noch ausreichend mit externen 5V versorgen. Ich denke hier an den autonomen Betrieb des Stacks ? Oder braucht es dazu schon das Power Supply ?
-
D.h. ich brauche 2 IPConnections in meiner Anwendung zum gleichzeitigen Betrieb der beiden Stacks, einen über die IP der WLAN-Exten. den anderen (Chibi) über Localhost (BrickD) ?! Wäre aber zu begrüßen, ich möchte meine Chibi-Erweiterung durchaus noch weiter benutzen und erweitern, entweder um die WLAN- oder dem Nachfolger der Chibis. Alle Chibi-Ext. durch WLANs austauschen, um weiterhin zukunftssicher zu arbeiten, bin ich nicht bereit ! Es sei denn jemand subventioniert das
-
Nur zu, ich hab damit keine Probleme. Lieber vorher zum WLAN-Teil nachfragen, vermeidet so manchen Ärger/Posting ein paar Tage später
-
Um ein hohes Drehmoment zu erreichen sollte man eher ein Getriebe zwischenschalten. Ein NEMA 23 Motor erreicht ab 1,5A schon ein ordentliches DMoment und wird vom Stepper-Brick (bis 2.5A) locker unterstützt, ausreichend für Kühlung der Platine sorgen. Das Drehmoment ist auch abhängig von der Drehzahl, und reduziert sich bei Halb/Viertel bzw. Achtelschrittaufl.
-
Schön, dass das Teil jetzt zu haben ist Gibt es einige Voraussetzungen bzgl. PC Hardware bzw. Betriebssystem Win7/XP zu beachten ? Ist die direkte Verbindung also WIFI-Direct (http://en.wikipedia.org/wiki/Wi-Fi_Direct) zw. Extension und PC ohne AccessPoint oder dergl. möglich ? Ist der Dual-Betrieb von beiden Funk-Ext. also Chibi und WLAN-Ext. innerhalb einer Anwendung uneingeschränkt möglich, also z.B. 1 Stack via Chibi, der 2 über die WLAN-Ext. ? D.h. für den Chibi-Betrieb wird weiterhin der BrickD genutzt. Die Bricks und Bricklets, die an der WLAN-Ext. hängen, bleiben in meiner Anwendung "transparent". Softw.mäßig bleibt also alles beim alten egal, ob nun über WLAN- oder Chibi-Ext. ? Der Stromverbrauch ist im Dauerbetrieb nicht ganz ohne, wird sich die Zeit ab wann der Transceiver in den Schlafmodus wechselt, per API-Methode setzen lassen ? Lässt sich das etwas besser spezifizieren, welche ca. Reichweite man mit den 3 versch. Antennengrößen unter idealen Bedingungen erreichen kann ?
-
@batti Da ist mir zu aufwendig. Da nehme ich mal schnell lieber ein USB-UART-Wandler von FTDI. Aber dann geht der Vorteil der kabellosen Verbindung in meiner Anwendung mittels Chibi verloren und ich habe eine weitere Baustelle/Treiber/API zu implementieren. Solange noch immer nicht alles hier zu den TF Teilen, Architektur, Zusammenspiel der Bestandteile und das OnDevice-Programming (einschl.Plugins) ausreichend kommuniziert wurde, ist das mehr eine Tüftelarbeit bzw. Trüffelsuche für Freaks. Die Nachfrage für ein universelles Schnittstellen-Brick für I2C, SPI, UART/RS232, GPIO etc. scheint doch vorhanden zu sein: http://www.tinkerunity.org/forum/index.php/topic,545.msg3140.html#msg3140 http://www.tinkerunity.org/forum/index.php/topic,501.msg2682.html#msg2682 Eine universelle Schnittstelle würde es uns Anwender ermöglichen, auch Sensoren bzw.Bausteine anderer Hersteller in den TF-Stack zu integrieren. Dort hat man sich z.B. ähnliche Gedanken gemacht: http://www.ledstyles.de/ftopic18832.html
-
Netbeans/Tinkerforge integrations Training
Thema antwortete auf Nics M4ST3R in: Software, Programmierung und externe Tools
Wie gesagt, das zu geringe Feedback der User war nicht gemeint... ob nun bald mal wieder ein Funkmodul geben könnte, oder wann ein Bug gelöst wird, oder ob spezielle Hardware Teile zu den TF-Sachen passen, kann und wird auch der schlaueste Anwender (im Urlaub oder nicht) hier nicht beantworten können -
Ich habe eine interessante Platine aus Finnland entdeckt, die PTP-Commands (http://en.wikipedia.org/wiki/Picture_Transfer_Protocol) via USB-Port direkt (!) an Digitalkameras überträgt. So sind zumindest Einstellung wie z.B. der Belichtungszeit oder ISO möglich. Dazu muss allerdings die Platine per UART-Schnittstelle (http://en.wikipedia.org/wiki/Uart) angesprochen werden. Ist die UART-Kommunikation mit Bricks und Bricklets ev. jetzt schon möglich, bzw. ist ein Brick-Platine dazu geplant ?
-
Netbeans/Tinkerforge integrations Training
Thema antwortete auf Nics M4ST3R in: Software, Programmierung und externe Tools
Sorry, ich kann mir nicht so richtig vorstellen, daß man mit kostenpflichtigen Aktionen dem zunehmend flachen Forentraffic (und erst recht nicht bei speziellen Themen) entgegenwirken wird. Für meinen Geschmack sind Engagement von User-Seite nicht das Problem. Ich denke, daß die Impulse - um hier mehr Resonanz zu schaffen - doch eher von TF kommen müsste als umgekehrt. Zuviele Postings und Fehlermeldungen wurden und werden nicht beantwortet bzw. gelöst, erst wenn einige "Kerzen" gezündet werden, tut sich "etwas". -
Netbeans/Tinkerforge integrations Training
Thema antwortete auf Nics M4ST3R in: Software, Programmierung und externe Tools
Sehe ich das richtig, das soll 300 Euro für 3 Tage Teilnahme kosten ? -
mySQL mit C# klappt nicht
Thema antwortete auf Nics saschakp in: Software, Programmierung und externe Tools
Hmmh, zumindest in Delphi gibt es die Möglichkeit verschachtelter Routinen (natürlich mit eingeschr. Gültigkeitsbereich). Möglich daß das seine Intension war, die InsertRow in die Main einzubetten. Allerdings bin ich mir nicht sicher ob sowas auch C# zulässt !? Den Aufruf von InsertRow habe ich auch nicht gefunden, kann aber auch immer öfters an meinen Augen liegen... PS: Zumindest für den 13.08 ist hiermit ein Posting im Forum gesichert PSS: Wozu soll der gut sein ? i.d.R. braucht man den Master-Brick in der Anwendung nicht. -
Zur 1.1.1 ist eig. nur das Monoflop-Feature hinzugekommen. http://www.tinkerunity.org/forum/index.php/topic,673.msg5173.html#msg5173 Zum Monoflop hierzu ev. mal nachlesen: http://www.tinkerforge.com/doc/Software/Bricklets/IO4_Bricklet_TCPIP.html#IO4.set_monoflop ob das irgendwie für Deine Situation ursächlich sein könnte. Ansonsten habe ich da auch so meine Erfahrungen gemacht mit Neuaufspielen usw. Fälscherweise lag es i.d.R. meist an anderen Ursachen. Ich würde mal das Bricklet an Port A bzw. B vom Brick durchprobieren, dabei nichts am IO4 angeschlossen lassen, also alle Schalter, Kabel weglassen. Und penibel prüfen ob der Bricklet Stecker wirklich sauber eingesteckt wurde. Nach jedem Neuanschluss/Wechsel des Bricklets den Brick resetten (Kleine Knopf links vom USB-Anschluss). Gibt es alternativ einen anderen Brick ? Verhält es sich da genauso ?
-
Noch eine Ergänzung dazu: Ev. ergänzt man diese Methode quasi als Standard in allen Bricks-APIs. Vielleicht ließe ein generischer Ansatz bzw. Design dieser Methode weitaus mehr Flexibilität zu, wenn dieser Methode nur ein Array of Function IDs der gewünschten Getter übergeben wird, um als Response wieder ein Array der Rückgabe-Werte zu bekommen. Natürlich wieder in der gleichen Reihenfolge wie der Arg.
-
Hmmh, das war bestimmt AuronX, um hier so ein bisschen zu klugsch...
-
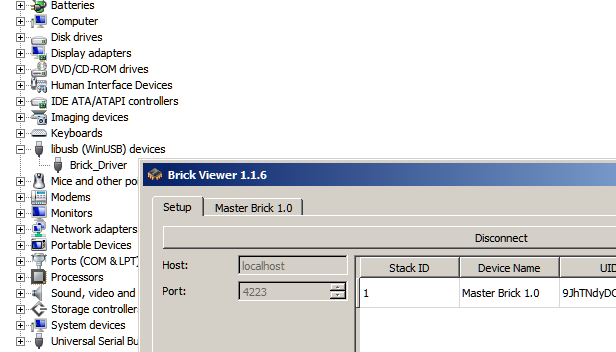
Habs auch gerade getestet: Wenn der Port auf 4222 ist bekomme seine Fehlermeldung ! Ha, war schneller. Und wenn er auf den richtigen Port schaltet und dann Connect drückt, wird zwar erfolgreich verbunden, und er guckt trotzdem ins Leere, wenn nicht das Brick angeschlossen ist. Also ist das auch wichtig.
-
Äaah, wenn nix am USB-Port hängt, wird der Viewer auch nix anzeigen können... siehe oben... Aber Firewall könnte schon sein, aber lokal auf dem Rechner ?? Ach so, meine Augen müsste es nicht Port : 4223 sein ?
-
Und der Brick_Driver ist im Dev-Manager zu sehen ? Wenn ja, Viewer starten und Connect drücken, kurz warten, dann müsste der Master zu sehen sein. ev. nochmals Reset-Button auf dem Brick drücken , links vom USB-Anschluss (Blick von oben auf das Teil).

-
Performance der Programmiersprachen (RasPi)
Thema antwortete auf Nics mruniversum in: Software, Programmierung und externe Tools
Das ist zu umständlich, und dürfte die Ursache für die schwache Performance sein. Es gibt übrigens PHP-Bindings hier im Portal mit denen Du direkt auf die TF-Teile zugreifen kannst. Wieso über java extra gehen ?! http://www.tinkerforge.com/doc/Software/Bricklets/DualRelay_Bricklet_PHP.html#dual-relay-bricklet-php -
Brennt vom Master-Brick zu Beginn das LED-Lauflicht und sieht man ein LED-Dauerlicht beim bzw. nach Anschl. des USb-Kabels ?