borg
-
Gesamte Inhalte
3.615 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
61
Alle erstellten Inhalte von borg
-

rs485 mit baud != 200000
Thema antwortete auf borgs wurststulle in: Software, Programmierung und externe Tools
Neue Master Brick Firmware ist online: http://download.tinkerforge.com/firmwares/bricks/master/ -
Firmwares: Master Brick 1.2.3, Stepper Brick 1.1.7 Stepper Brick: Stop state machine after disable call, don't drive if max velocity = 0 Master Brick: Use dynamically calculated timeouts for RS485, improve bricklet readout Download Firmwares: Master Brick, Stepper Brick
-
Firmwares: Master Brick 1.2.3, Stepper Brick 1.1.7 Stepper Brick: Stoppe Statemachine nach Disable Aufruf, nicht fahren falls max velocity=0 Master Brick: Dynamisch kalkulierte Timeouts für RS485, schnelleres Bricklet auslesen Download Firmwares: Master Brick, Stepper Brick
-
rs485 mit baud != 200000
Thema antwortete auf borgs wurststulle in: Software, Programmierung und externe Tools
Kurzer Zwischenbericht: Da ist wirklich irgendwas faul. Ich hatte mit den unterschiedlichsten Baudraten getestet und sie hatten alle funktioniert. Aber gerade 9600 und 19200 gehen bei mir auch nicht, komisch. Edit: Ich hab das Problem gefunden. Ich hab ein Paar Timeouts zu niedrig gewählt, die musste ich dynamisch an die Baudrate anpassen. Ich gehe davon aus das ich damals erst mit hohen Timeouts getestet hab und die dann später nochmal verringert hab. Uuuuups! Ich veröffentliche heute Abend eine neue Master Brick Firmware. -
Das ist ein ganz normaler 900Mhz SMA Stecker (nicht RP-SMA!).
-
rs485 mit baud != 200000
Thema antwortete auf borgs wurststulle in: Software, Programmierung und externe Tools
Sollte definitiv gehen. Hast du auch beide umgestellt? Ich hab damals einige Baudrate getestet, ob 9600 und 19200 dabei waren kann ich jetzt nicht sagen, teste ich heute Abend nochmal schnell. -
Ging es dir jetzt nur um das "Under Construction" im Wiki? Das könnten wir ja im Zweifelsfall einfach entfernen. Oder was könnten wir sonst tun um dem ganzen mehr "leben" zu verschaffen?
-
Die RS485 Extension shiftet Pinne im Stack um, es ist (im Moment) nicht möglich eine Extension anzusprechen die im Stack über einer anderen Extension sitzt. Das mache ich zusammen mit der WLAN Extension fertig.
-
Kümmer ich mich drum .
-
Die 0 und 1 sind schon dafür vorgesehen. Einstens Vorschlag wird zu nichts führen, die Pinne für die Extensions 2*(SPI+I2C+1xSelect+3xGPIO) werden im Stack geshiftet auf andere Pinne, damit die 2 Extensions elektrisch an andere Pinne am Master verbunden sind. Die Pinne mit denen die Extensions angesprochen werden sind allerdings im Moment fest. D.h. eine Extension die an "zweiter Stelle" sitzt kann im Moment definitiv nicht angesprochen werden. Wir werden auf Dauer alle Extensions, soweit technisch möglich, miteinander kompatibel machen. Die RS485 Extensions wird z.B. direkt über eine USART Schnittstelle angesprochen von der nur eine im Stack liegt. Es ist also technisch nicht möglich diese zu einer anderen Extension kompatibel zu machen die diese Schnittstelle benötigt. Da sind dann einfach irgendwo die Grenzen, wir legen ja schon 80 Pinne durch den Stack!
-
Ich hatte vor mich darum zusammen mit der WIFI Extension zu kümmern. Das ist viel Arbeit, da muss auch noch zusätzliche API her. Wenn du einen Stack hast der nicht per USB angeschlossen ist und der zwei Extensions hat ist ja erstmal vollkommen unklar welche dieser Extensions Master und welche Slave sein soll oder ob sogar beide Master sein sollen (wie in deinem Fall).
-
Mh, der Treiber IC auf dem DC Brick ist für 28V, 5A kontinuierlichen Betrieb ausgelegt. Da muss dann in deinem Fall wohl die Kühlleistung von dem kleinen Kühlkörper nicht ausreichen. Ich befürchte da muss eine aktive Kühlung her. Oder zieht der Motor vielleicht erheblich mehr Strom als offiziell angegeben? Ein "short circuit" detektiert der Treiber ab 6,5A.
-
Zwei Extensions gleichzeitig werden im Moment in der Firmware leider noch nicht unterstützt.
-
Brick Daemon für openwrt
Thema antwortete auf borgs wurststulle in: Software, Programmierung und externe Tools
Jop, definitiv. Wir hatten keine Big Endian Maschine zur Hand und das entsprechend nicht getestet. Ich denke wir werden das auf einem MIPS Board o.ä. testen müssen. Wenn du es zum laufen kriegst würden wir uns natürlich über einen Patch freuen! -
Brickd Installations Paket Mac OS X Mountain Lion
Thema antwortete auf borgs SierraX in: Software, Programmierung und externe Tools
Mh, müssen wir uns angucken. Was haben die denn da wieder geändert, dass der Installer nicht mehr geht? Ist Mountain Lion überhaupt schon veröffentlicht? -
Segmentation Fault
Thema antwortete auf borgs frankiefoo in: Software, Programmierung und externe Tools
Also bei mir gibt es keine Probleme mit meinem Thinkpad X41 mit der IMU. Kannst du das unter Debian mal mit strace starten und gucken ob irgendein sinnvoller Hinweis dabei rumkommt? -
Servo Brick als "Moderator" für Versuchsaufbau
Thema antwortete auf borgs Markus in: Projektvorstellungen und Projektideen
@Markus: Bin noch nicht dazu gekommen, Schaltplan gibt es bei uns in der Dokumentation unter "Resources": http://www.tinkerforge.com/doc/Hardware/Bricks/Servo_Brick.html#resources -
Es gibt Changelogs im git, z.B.: https://github.com/Tinkerforge/master-brick/blob/master/software/changelog Wäre aber vermutlich nicht schlecht die auch irgendwie mit in den Downloadbereich zu packen .
-
[C#] Sind die Methoden der Bricks und Bricklets alle threadsafe?
Thema antwortete auf borgs RalphK in: Software, Programmierung und externe Tools
Die API ist zu 100% threadsafe. -
Die Hintergrundbeleuchtung vom LCD und der Distance IR Sensor werden über die 5V vom PC betrieben. Dein PC liefert weniger Spannung wenn du den Strom erhöhst (Das gilt leider auch für die USB Power Supply bei uns im Shop und für alle anderen billigen "USB Ladegeräte"). Das kannst du nur mit einer Step-Down Power Supply umgehen.
-
Rätselhafte RS485 Modul Phänomene
Thema antwortete auf borgs salvo in: Software, Programmierung und externe Tools
Das Log sieht soweit gut aus. Sagt er vielleicht beim starten von brickd das ihm gudev fehlt? Du brauchst python-gudev für die Hotplug Funktionalität. -
Brick Daemon für openwrt
Thema antwortete auf borgs wurststulle in: Software, Programmierung und externe Tools
Ich befürchte die C Bindings achten nicht auf Endianness und die WRT haben einen Prozessor mit MIPS Architektur (Big Endian). Die Mikrocontroller auf den Bricks erwarten Little Endian. Das steht schon seit langer Zeit auf meiner TODO Liste, sollten wir wirklich fixen. -
Rätselhafte RS485 Modul Phänomene
Thema antwortete auf borgs salvo in: Software, Programmierung und externe Tools
Kannst du uns davon ein Log besorgen? In der config.py im brickd Order LOGGING_LEVEL auf logging.DEBUG setzen. Die Logfile liegt dann in /var/log/brickd Also manchmal tauchen beide Slaves auf? Oder geht es nie? Wenn der zweite Slave manchmal auftaucht klingt es doch so als sei die Baudrate zu hoch eingestellt. Kannst du zum testen mal kürzere Kabel verwenden? Um zu gucken ob die Kabellänge hier bei dem Problem überhaupt relevant ist. -
Rätselhafte RS485 Modul Phänomene
Thema antwortete auf borgs salvo in: Software, Programmierung und externe Tools
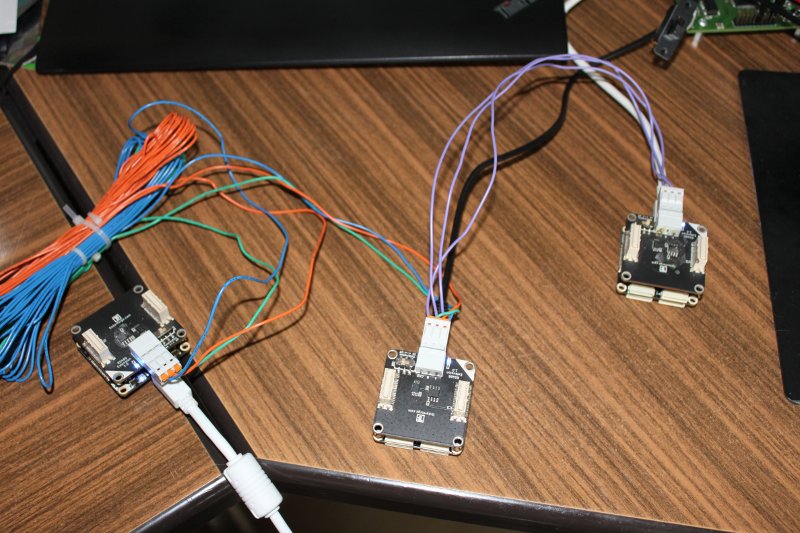
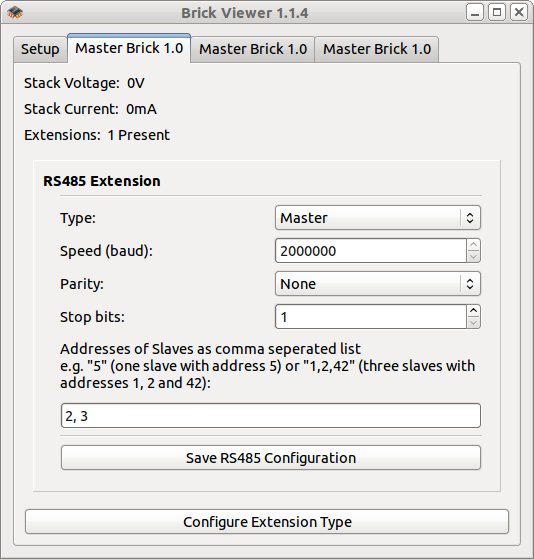
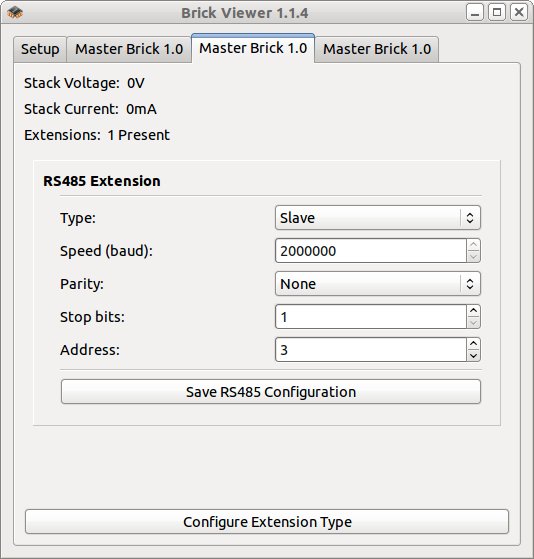
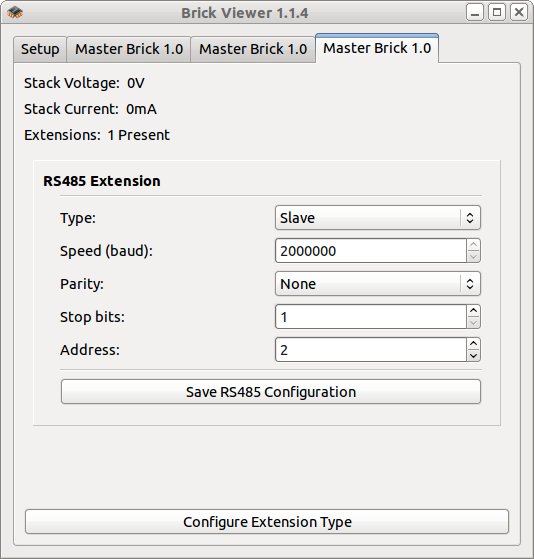
So, hab das mal gerade nachgestellt (siehe Anhang). Aufbau v.l.n.r.: Master mit RS485 Extension, versorgt über USB vom PC, konfiguriert als RS485 Master mit Slaves 2 und 3, Termination On (brickv1.jpg) Master mit RS485 Extension, versorgt über USB Power Supply, konfiguriert als RS485 Slave (Adresse 3) und Termination Off (brickv2.jpg) Master mit RS485 Extension, versorgt über USB Power Supply, konfiguriert als RS485 Slave (Adresse 2) und Termination On (brickv3.jpg) Das funktioniert einwandfrei bei mir. Ist das jetzt so äquivalent zu deinem Aufbau? Wenn nicht, wie kann ichs nachstellen ? Edit: Was mir da noch zu einfällt: Hast du auch die Slaves vor dem Master gestartet? Es gibt da kein "Hotplug".
-
Der Prozessor und RAM und weiterer kram ist auf einem kleinen Zusatzboard das aufgesteckt wird: http://www.hardkernel.com/renewal_2011/products/prdt_info.php?g_code=G134032695534 Das ist 42x25mm groß und würde zwischen unsere board-to-board Stecker passen. Da kriege ich das große Leuchten in den Augen . Ist das erste Modul dass ich sehe, welches man verwenden könnte um ein "Linux-Master Brick" zu machen. Leider gibts zu dem Board keine Preise und noch nichtmal ein Pinout o.ä.