



borg
Administrators
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von borg
-
Bei Hyundai/Kia kann man extern über einen V2L Adapter den man in den Typ2-Port steckt 230V-Geräte anschließen. Da findet aber keine Netzsynchronisation statt., das kann man nicht einfach mit dem Hausnetz verbinden. Bei dem Feldversuch ist da sicher noch irgendetwas zwischengeschaltet worden. Hyundai/Kia machen da aber ihr eigenes Ding, das ist kein Standard den wir unterstützen könnten. Für uns würde da schon nur V2G in Frage kommen wie es in ISO15118 für DC spezifiziert ist. Rein technisch würde man dafür so ein Modul brauchen: https://www.codico.com/de/white-beet-ei-evse-embedded-iso15118-module, ein Kabel mit CCS Stecker und ein Wechselrichter der dann auch Netzsynchronisation macht. Das ist was die ID-Modelle von VW rein hardwaretechnisch (aber noch nicht die Software?) unterstützen. In der Praxis fehlt dafür aber aktuell noch die rechtliche/steuerrechtliche Grundlage. Was ist z.B. wenn ich auf der Arbeit steuerfrei lade und das dann bei mir zuhause einspeise und im Haus verbrauche oder sogar wieder verkaufe? Rein theoretisch sieht ISO15118 auch eine Rückspeisung über AC vor, dafür hat allerdings soweit ich weiß noch kein Serienfahrzeug eine Hardwareunterstützung. Das wird also denke ich so schnell nicht kommen. Ein weiteres Problem ist, dass die Autohersteller kein Interesse daran haben das die Batterie häufig geladen/entladen wird, die geben ja schließlich 8 Jahre Garantie darauf. VW hat z.B. jetzt schon festgelegt das man bei den ID-Modellen maximal 10000kWh entladen darf, danach ist kein V2G mehr möglich. Wenn wir sagen wir können dann 0,25€ pro kWh sparen (dadurch das wir Tagsüber Solarstrom laden und dann Abends das Haus damit betreiben) entspricht das einem Einsparpotential von "nur" 2500€ auf die Lebenszeit des Autos. Dafür hab ich dann aber den zusätzlichen Batterieverschleiß im Auto, die Mehrkosten für eine Wallbox die das unterstützen muss und einen weiteren Wechselrichter der nicht ewig hält etc. Ein Haus-Batteriespeicher der nicht die hohen Peak-Ströme unterstützen muss und darauf ausgelegt ist häufig be-/entladen zu werden hat da schon auch Vorteile.
-
Kannst du einmal über Wallbox -> Ladestatus -> Ladeprotokoll per "Start" ein Ladeprotokoll starten, dann versuchen zu laden und dann per "Stop+Download" das Ladeprotokoll herunterladen und hier anhängen? Dann können wir uns anschauen wie der Zustand der Wallbox ist wenn versucht wird zu laden.
-
Wir würden sonst die Typ2-Kabel von Metron empfehlen: https://eauto.si/metron-shop/product/xc01t-type-2-pigtail/ Die haben einige Kunden von uns nachgerüstet für den Tesla-Button. Da ist aber eine Batterie drin die irgendwann gewechselt werden muss und der Stecker ist auch nicht mehr so Wasserdicht wie die angegossenen Stecker die wir bei unseren Standardkabeln haben.
-
Wenn das "Entladen" irgendwann gesetzlich/steuerrechtlich vernünftig geregelt ist und sich alle auf irgendeine (zu allen Autos kompatible) Technik geeinigt haben würde ich es nicht ausschließen das wir auch DC Wallboxen machen auf Dauer. Ich bin mir aber nicht sicher ob es im Privatbereich überhaupt einen Markt dafür geben wird: https://www.mobilityhouse.com/de_de/ladestationen/dc-ladestationen.html Was würdest du denn für eine DC Wallbox die V2H kann ausgeben?
-
Sieht leider alles gut aus. Ich kann in dem Protokoll sehen das kein Auto angeschlossen ist (Widerstand zwischen CP/PE unendlich). Dann wird das Auto angeschlossen (Widerstand 2500 Ohm). Dann legt der WARP Charger ein PWM an, worauf das Auto einen Widerstand von 880 Ohm anlegt. Dann schaltet die Wallbox das Schütz und 35 Sekunden später legt das Auto wieder einen Widerstand von 2500 Ohm an woraufhin die Wallbox das Schütz wieder ausschaltet. Das ist alles wie erwartet, d.h. das Auto sagt von sich aus nach 35 Sekunden das es nicht mehr laden möchte. Zeigt das Auto irgendwas an im Display? Irgendeine Fehlermeldung oder so? Andere Frage: Hörst du dass das Schütz schaltet und nach 35 Sekunden wieder ausschaltet?
-
Wie weit die Servos drehen stellst du mit der Pulse Width ein. Du müsstest da also das min verringern und das max vergrößern, soweit bis du +-90° erreichst von der Mittelstellung aus. Wichtig ist nur das du aufpasst das die Servos nicht in den Anschlag gehen. Die Servos die du hast drehen aber vermutlich alle 180°, daher sollte das kein Problem sein.
-
Ich kann auf die Schnelle nichts online finden wo sich jemand schonmal das Protokoll angeschaut hat von der M-AFS200. Kann gut sein dass die ihr eigenes Protokoll haben. Hier gibt es ein Thread zur M-AFS300: https://forum.fhem.de/index.php?topic=29723.0 Die schreiben auch dass sie es nicht zum Laufen bekommen :(.
-
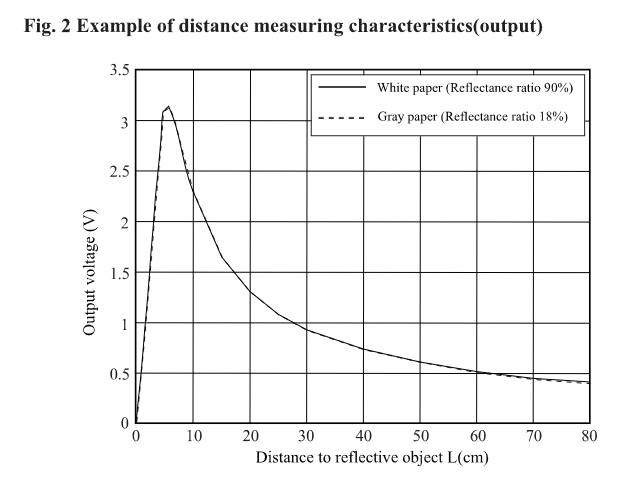
Ich befürchte der Unterschied ist innerhalb der Toleranz des Sensors. Der Hersteller gibt sogar noch nichtmal eine Formel o.ä. sondern nur charakteristisch wie die Ausgabe aussieht: Ich vermute am einfachsten ist es du kalibrierst das nochmal pro Sensor in deinem Python-Programm wenn du mehr Genauigkeit brauchst. Die Kalibrierung auf dem Bricklet haben wir erstellt aus dem Mittelwert von mehrere Sensoren.
-
Sehr komisch. Wir schicken dir nochmal ein neues Servo Bricklet hinterher, ich hab sonst keine Idee warum es jetzt nicht funktionieren sollte.
-
Du kannst mit Eulerwinkeln leider nicht jede Position im Raum eindeutig angeben, siehe Gimbal Lock: https://de.wikipedia.org/wiki/Gimbal_Lock Ich glaube das ist hier dein Problem. Du müsstest da wirklich mit Quaternions arbeiten an der Stelle.
-
Das sieht alles soweit richtig aus. Das Servo Bricklet gibt die eingespeiste Spannung einfach auf die Servos. Die meisten Servos erwarten eine Spannungsversorgung von 5V-6V. Wie lange hast du denn die 19V angeschlossen? Nicht das die Servos dadurch schaden genommen haben. Hast du irgendeine andere Möglichkeit zu Testen ob die Servos prinzipiell funktionieren?
-
Kannst du mal ein Foto davon machen wie die Servos angeschlossen sind?
-
Bitte aktualisiere einmal deine Firmware auf die neueste Version, ich vermute du hast schon Hardware-Version 2.2 vom Bricklet. Siehe hier für Details:
-
Problem gefunden, wir haben eine neue Hardware-Version des Bricklets (HW 2.2) bereits verkauft, obwohl die Software dafür nur im Testsystem und noch nicht veröffentlicht war. Ich nehme an du hast schon die neue Hardware-Version. Etwas peinlich... das hätte uns natürlich schneller auffallen können. Die neue Firmware sollte direkt im Brick Viewer angezeigt werden, oder hier: http://download.tinkerforge.com/firmwares/bricklets/led_strip_v2/bricklet_led_strip_v2_firmware_2_1_0.zbin Änderungen: https://github.com/Tinkerforge/led-strip-v2-bricklet/commit/7d7d54401e2666967764ba874a754f696c3bf068
-
Firmware: LED Strip Bricklet 2.0 2.1.0 Add support for hardware version 2.2 Download: LED Strip Bricklet 2.0
-
Firmware: LED Strip Bricklet 2.0 2.1.0 Add support for hardware version 2.2 Download: LED Strip Bricklet 2.0
-
Das Kit ist von der Höhe her auf die Stift-/Buchsenleisten beim RPi ausgelegt, unsere normalen Kits waren glaub ich etwas zu hoch.
-
Mh, weißt du was das genau für ein LED Strip ist? Ist da wirklich ein "echter" WS2811 drauf oder etwas das ähnlich funktioniert? Gerade das letzte Problem (du setzt eine feste Farbe aber es werden unterschiedliche angezeigt) deutet irgendwie darauf hin das wir mit einer anderen Frequenz die Daten senden als die LEDs erwarten. Beim WS2811 gibt es ja keine Clock-Leitung.
-
Kannst du einmal ein Foto davon machen wie du den LED Streifen am Bricklet angeschlossen hast? Mein erster Gedanke ist, dass vielleicht Clock und Daten vertauscht ist.
-
Probier mal die Kalibrierung im Anhang :) calibration.json
-
Optimalerweise startest du unter Wallbox -> Ladestatus -> Ladeprotokoll -> Start ein Ladeprotokoll. Startest dann eine Ladung am Auto mit 16A und gehst (jeweils mit 30 Sekunden Wartezeit) In 1A-Schritten runter bis 6A. Dann Wallbox -> Ladestatus -> Ladeprotokoll -> Stop+Download und mir das Ladeprotokoll schicken. Dann kann ich das einmal spezifisch für deine Wallbox kalibrieren.
-
Ja du kannst PV-Überschussladen selbst implementieren über die API. Der Energy Manager macht ja auch nichts anderes. Eine andere Alternative wäre sonst auch noch EVCC falls du das noch nicht gesehen hast.
-
Die Low-Tech-Lösung wäre dass du per Default 1-phasig lädst und nur wenn du es eilig hast händisch auf 3-phasig umstellst bevor du das Auto anschließt.
-
Wir haben leider keinen festen Elektriker in Hamburg. Grundsätzlich sollte aber jeder Elektriker der einen Termin für dich frei hat den WARP2 Charger anbringen können, das ist kein Hexenwerk.
-
Das Auslesen per SPI übernimmt auch BSEC. Allerdings werden die Daten von BSEC zwischengespeichert in Feldern wo wir dran kommen, ich denke man könnte die "Gas Resistance" mit ausgeben in Theorie. Aktuell ist es aber leider nicht drin in der Firmware.

