borg
-
Gesamte Inhalte
3.611 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
61
Alle erstellten Inhalte von borg
-

[Wifi] What is the expected behavior on power OFF/ON?
Thema antwortete auf borgs JavaLaurence in: General Discussion
If you reset a stack by hand (power on/off or reset button) or if you call the reset function, it will reassociate. If your stack resets because of EMI problems caused by the long cable, anything might happen (it possibly doesn't restart correctly and the WIFI module is in a broken state). You may need to power it off in that case, so the WIFI module can completely reset itself. How many Bricklet ports do you have for how many Bricklets? From an EMI perspective it would make sense to use a single Master Brick for the LCD20x4 Bricklet, since all Bricklets on a Master use the same I2C bus. -
Massive "reset" Probleme nach Update auf Protokoll 2.0
Thema antwortete auf borgs remotecontrol in: Hardware
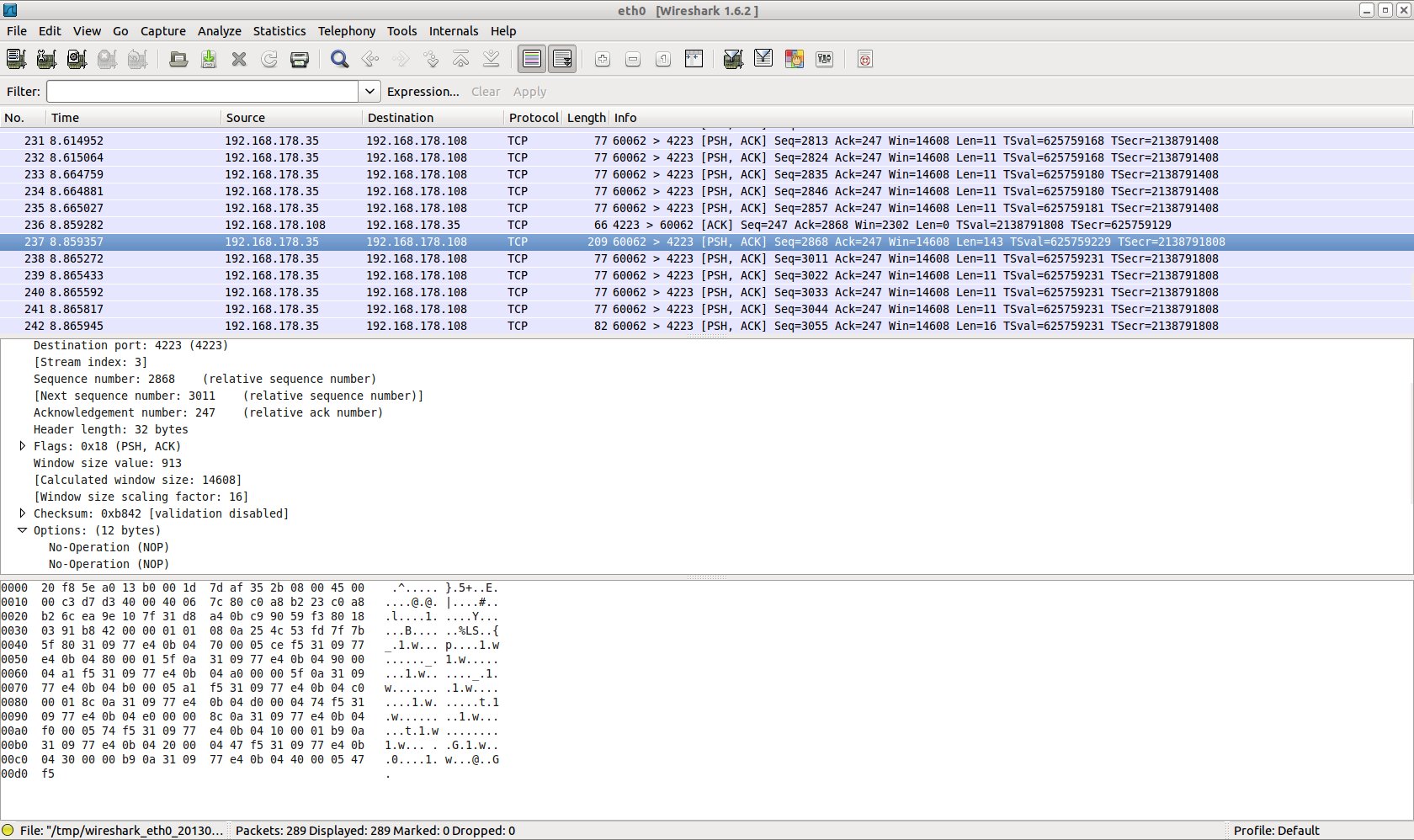
Den Aufbau hab ich hier quasi auch: PC -> Gigabit Cisco Switch -> FritzBox -> Stack. Ich denke der Switch und der Router sind für die Probleme hier nicht relevant. So wie ich das sehe passiert folgendes: Das WIFI Modul auf der WIFI Extension arbeitet mit delayed ACKs (http://en.wikipedia.org/wiki/TCP_delayed_acknowledgment). Ist in dem Screenshot auch zu sehen, dort gibt es ganz viele Nachrichten vom PC (77 Byte) und dann werden die alle mit einem ACK beantwortet. Nun scheint es aber so zu sein, dass der PC nach einer Zeit aufhört zu senden wenn er kein ACK bekommen hat. Das WIFI Modul sendet aber erst das delayed ACK wenn der Buffer voll ist (1500 Byte). Da gibt es ein Timeout von 200ms (d.h. wenn der Buffer nach 200ms nicht voll ist, sendet das WIFI Modul trotzdem das delayed ACK). Da lagst du mit deinem "5hz ruckeln" schon sehr gut . Interessant ist jetzt: Wenn der Stack Nachrichten zum zurücksenden hat (damals die Reached Nachrichten vom Servo), dann wird das ACK auch schon frühzeitig zusammen mit diesen Nachrichten rausgeschickt. Daher gab es das 5hz ruckeln dort nicht. Ich denke damit ist die Problematik ziemlich gut verstanden, es ist eine Mischung aus dem 200ms Timeout und der Anzahl der Nachrichten die das Betriebssystem schickt bevor es erstmal aufgibt wenn kein ACK kommt. Das Verhalten wird hier vermutlich von OS zu OS unterschiedlich sein. Falls hier jemand weiß wie man sowas für gewöhnlich löst oder umgeht: Immer raus damit . Ich bin mir nicht sicher ob wir die 200ms Timeout auf dem WIFI Modul verringern können. Dokumentiert ist da nichts, werde aber am Montag den Hersteller fragen. -
Massive "reset" Probleme nach Update auf Protokoll 2.0
Thema antwortete auf borgs remotecontrol in: Hardware
Also es ist definitiv so, dass die Daten zum Teil gebündelt bei der WIFI Extension ankommen, hier meine Debug Ausgabe: poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll poll [31, 9, 77, e4, b, 4, 50, 0, 0, fd, 2, poll 31, 9, 77, e4, b, 4, 60, 0, 5, 3, fd, poll 31, 9, 77, e4, b, 4, 70, 0, 1, 2a, 3, poll 31, 9, 77, e4, b, 4, 80, 0, 4, d6, fc, poll 31, 9, 77, e4, b, 4, 90, 0, 0, 2a, 3, poll 31, 9, 77, e4, b, 4, a0, 0, 5, d6, fc, poll 31, 9, 77, e4, b, 4, b0, 0, 1, 57, 3, poll 31, 9, 77, e4, b, 4, c0, 0, 4, a9, fc, poll 31, 9, 77, e4, b, 4, d0, 0, 0, 57, 3, poll 31, 9, 77, e4, b, 4, e0, 0, 5, a9, fc, poll 31, 9, 77, e4, b, 4, f0, 0, 1, 84, 3, poll 31, 9, 77, e4, b, 4, 10, 0, 4, 7c, fc, poll 31, 9, 77, e4, b, 4, 20, 0, 0, 84, 3, poll 31, 9, 77, e4, b, 4, 30, 0, 5, 7c, fc, ] poll Die "polls" sind im 1ms takt und wenn Daten da sind, werden sie mit ausgegeben. "[" und "]" geben ein einzelnes TCP/IP Paket an. Da ist also eine ganz Zeit nichts und dann auf einmal kommt 14x setPosition. Im Anhang das ganze nochmal in Wireshark. Dort sieht man die ganzen setPosition (die 77 Byte großen Pakete). Die gehen also eine ganz Zeit lang einzeln durch und dann auf einmal kommt ein Paket der Größe 209 wo die besagte Vielzahl an setPositions drin ist (siehst du auch unten im Payload, dort ist mehrfach 31 09 77.. drin). D.h. die Pakete werden wirklich so vom Betriebssytem losgeschickt. Jetzt muss ich dir allerdings recht geben: Wenn ich die Wi-Fi Strecke extern aufbaue von PC nach PC und dann über USB kommuniziere hab ich diesen Effekt nicht. Die Frage ist also: Was macht die WIFI Extension, das dazu führt, dass das PC Betriebssystem mehrer Nachrichten in ein Paket zusammen schnürt?
-
Kompilieren in Eclipse
Thema antwortete auf borgs davidkoch in: Software, Programmierung und externe Tools
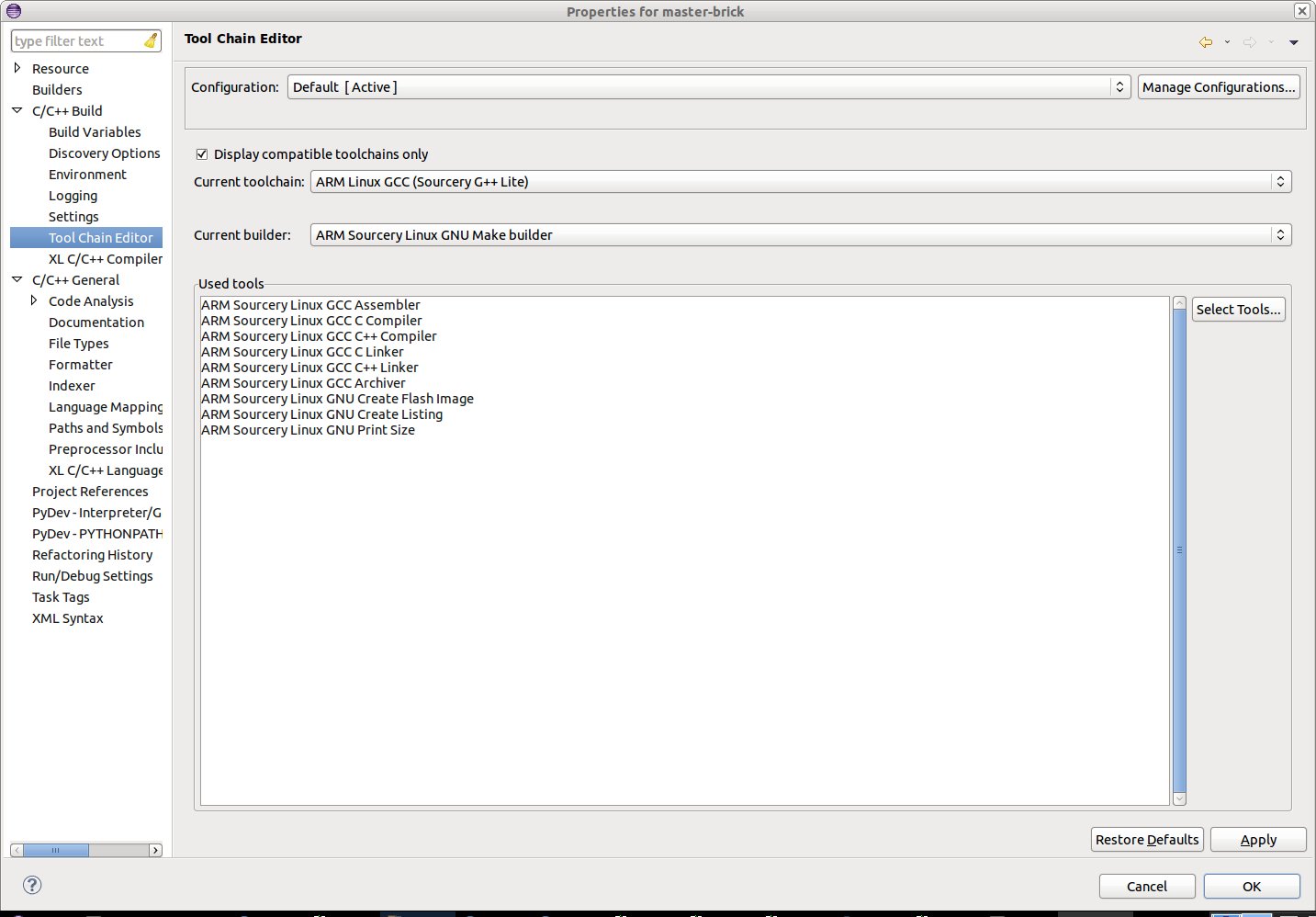
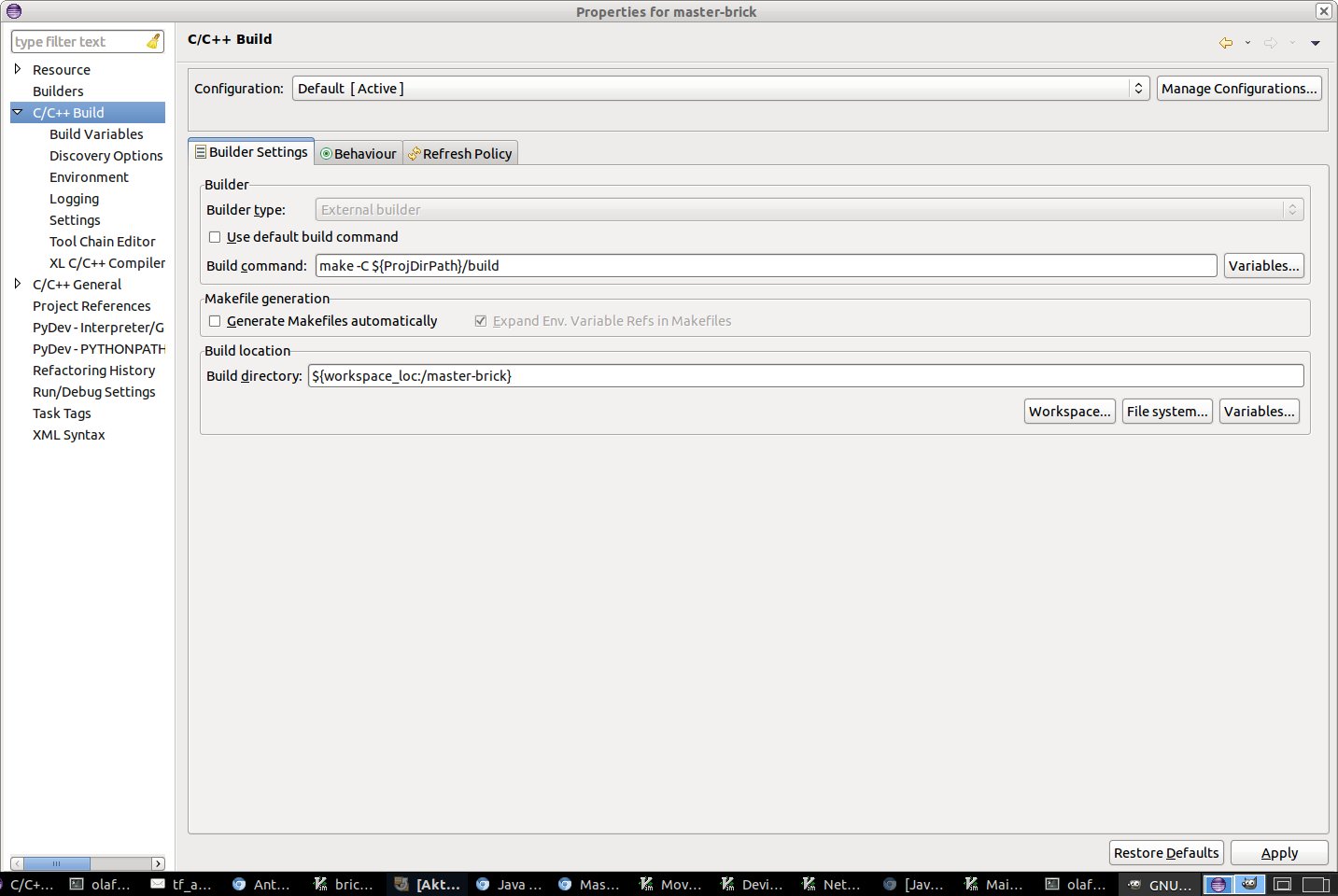
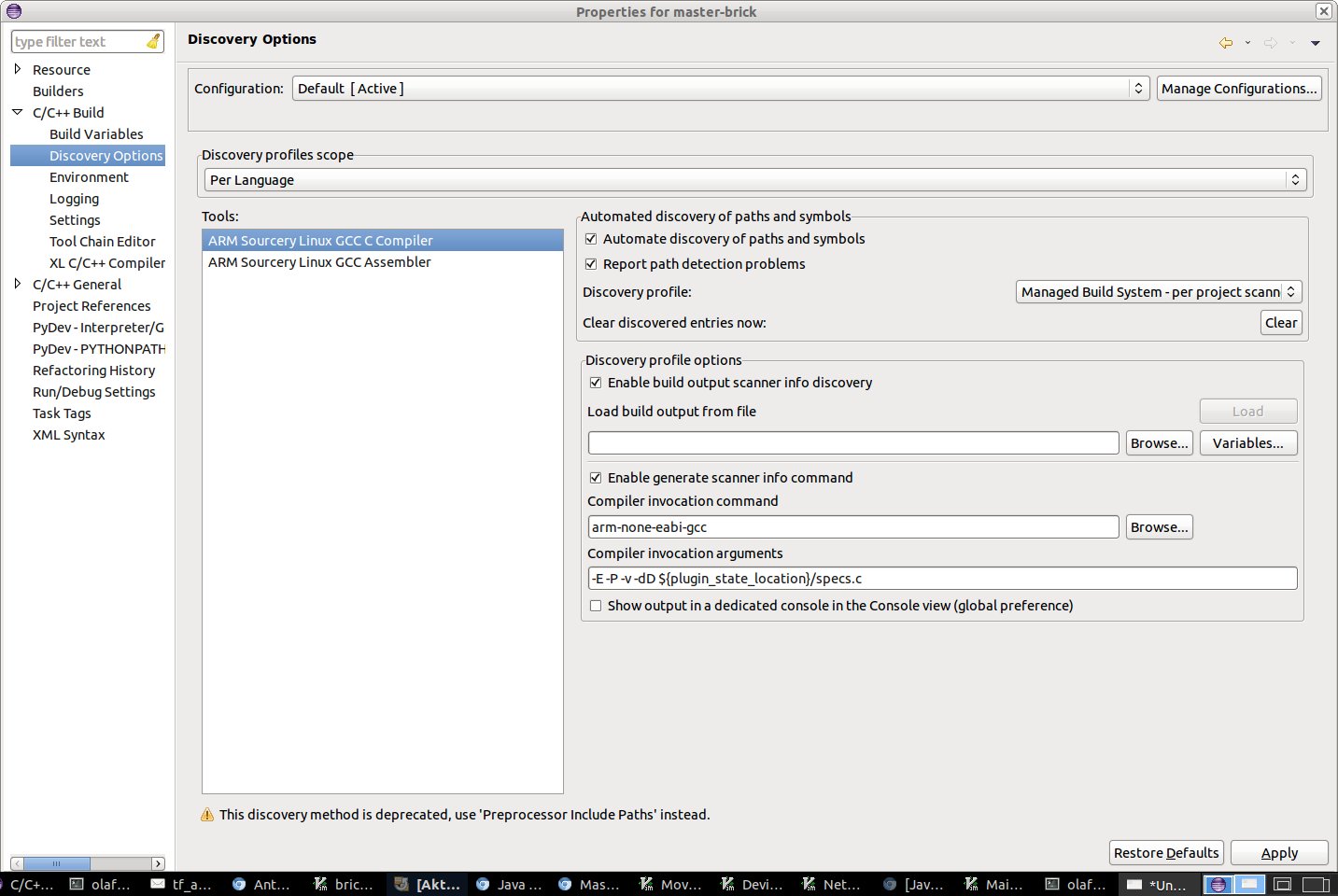
Also ich kompiliere in Eclipse auch einfach über das Makefile. Ich hab mal ein paar Screenshots von der Konfiguration angehängt. Ansonsten könnte auch dieser Thread interessant sein: http://www.tinkerunity.org/forum/index.php?topic=1171.0
-
Massive "reset" Probleme nach Update auf Protokoll 2.0
Thema antwortete auf borgs remotecontrol in: Hardware
Ich denke du rufst da einfach so viele Setter auf, dass das Betriebssystem die in ein großes Paket bündelt. Dadurch kommen die Daten dann immer so schubweise an. Du musst also eigentlich sicherstellen, dass das setzen einer Position schon ausgeführt wurde wenn du die neue rausschickst. Das geht z.B. in dem du ReponseExpected aktivierst für setPosition: ((BrickServo)device).setResponseExpected(BrickServo.FUNCTION_SET_POSITION, true); In Zeile 91 in DeviceItem.java. Da gibt es vermutlich eine bessere Stelle für . Dann siehst du auch, dass die Queue vollläuft und du eigentlich zuviele Nachrichten schickst. Ich glaube ich würde versuchen die setPosition Aufrufe auf ein 10ms Intervall zu minimieren. Ich versuche nochmal herauszufinden ab wo genau die Messages schubweise durchgehen, aber ich bezweifle das es etwas ist was wir beeinflussen können . -
Das muss es nicht, sieht aber hübscher aus so . Ah ja, da haben wir auch lange dran rumprobiert. Die Raspberry Pi Ausbaustufe ist das Problem. Das ist auf den Fotos jetzt nicht zu sehen, aber du kannst neben dem Master ein DC Jack Adapter anbringen, unter dem Master eine Step-Down Power Supply. dann den Master per USB mit dem Raspberry PI verbinden, die Wetterstation von außen über den DC Jack mit Strom versorgen und das Rapsberry Pi über den grünen Stecker der Step-Down mit Strom versorgen. Der RPi sitzt dabei unter dem LCD20x4. Für alles das sind Bohrungen usw vorgesehen. Das ist eine der schönsten Ausbaustufen, da die Wetterstation dort autonom ist man sie von außen einfach mit einem Notebook Netzteil oder so versorgen kann, was man vermutlich rumliegen hat. Allerdings ist in dieser Ausbaustufe die komplette rechte Seite mit Leiterplatten belegt. Die einzige freie stelle ist da, wo das Aufhängeloch ist. Dafür mussten die Abstandshalter dann außerhalb gesetzt werden .
-
Massive "reset" Probleme nach Update auf Protokoll 2.0
Thema antwortete auf borgs remotecontrol in: Hardware
Soooo, ich konnte das reproduzieren. Konnte den schuldigen auch ausfindig machen: Das Servo Brick. Oder spezifischer: Die VelocityReached und PositionReached Callbacks des Servo Bricks. Du hattest in dem Testprogramm die Velocity aufs Maximum gesetzt und dann mehrere Servos in sehr kurzen Abständen mit kleinen Positionsveränderungen gesteuert. Dadurch war bei jedem setzen eines Stellwerts immer sofort die neue Position und die volle Velocity erreicht. D.h. es gab für jedes Servo quasi immer zwei Nachrichten die zu senden waren. Dadurch haben sich Stück für Stück Nachrichten im Ringbuffer aufgestaut, bis er voll war. Danach haben sie sich dann im Buffer der WIFI Extension aufgestaut, bis er voll war. Und dann passiert etwas böses: Das WIFI Modul nimmt die TCP/IP Pakete an, schreibt soviel in den Buffer wie er kann und schmeißt den Rest weg. An der Stelle hab ich dann verloren, sobald ich diese Daten abarbeite lese ich Schrott und dann tritt das Verhalten auf was du beschrieben hast. Lösung für dein spezifisches Problem: VelocityReached und PositionReached Callbacks an/abschaltbar machen. Ich hab mal eine Servo Brick Firmware angehägt bei der die Callbacks anschaltbar sind, Default ist aus. Damit kann ich mit deinem Testprogramm keine Probleme mehr erzeugen. Wenn das bei dir funktioniert würde ich das auch noch für die *Reached Callbacks von DC und Stepper Brick implementieren. Das stand übrigens sowieso schon auf der TODO Liste . brick_servo_firmware_2_0_1-beta1.bin -
Oh, auf dem Bild fehlt in der Tat entweder die Batterie oder ein erklärender Text. du musst die Batterie an VIN und GND anschließen. Der positive Pol der Batterie (+) geht an VIN und der negative Pol (-) geht an GND.
-
Das ist ja ulkig, warum sollte er denn "localhost" nicht resolven können? Hast du schonmal probiert "127.0.0.1" anstatt "localhost" zu nehmen?
-
In der Grundausbaustufe wird der Temperatursensor vom Barometer genommen. Wir haben aber Platz in der Wetterstation für 3 Master Bricks (oder 2 Master + 1 WIFI oder 2 Master + 1 Ethernet, etc). D.h. da gibt es sehr viele mögliche Ausbaustufen, von denen wir auch einige mit entsprechenden Schritt-für-Schritt Anleitungen darstellen werden. PMMA lässt sich ungefähr so behandeln wie Holz, dadurch ist es sehr einfach neue Löcher o.ä. hinzuzufügen. Zum Beispiel um schöne große Knöpfe auf die Linke Seite der Wetterstation anzubringen, zum durchschalten der Modi (macht mehr Spass als die kleinen Knöpfe am LCD20x4 ). Und so weiter, es wird da sehr viele mögliche Ausbaustufen geben! @Lötkolben: Master um 90° drehen damit das USB Kabel unten rausgeht sollte gehen. So wie er im Foto angebracht ist kann man eine WIFI Extension drauf setzen und die Antenne geht exakt rechts raus und nach oben weg, das sieht dann schick aus .
-
Stabilste Verbindung der Wifi Extension gesucht
Thema antwortete auf borgs webster7567 in: Allgemeine Diskussionen
Ich würde folgenden Hardwareaufbau machen: Aufbau Steuerung: 1x Laptop + Master + 2x Joystick Bricklet über USB Aufbau Regelung: 1x Raspberry PI + USB WLAN Stick + Step-Down Power Supply + Master + Servo Brick + 2x Analog In Und folgenden Aufbau für die Software: Programm Steuerung: Läuft auf Laptop. Es nimmt die Befehle der Joysticks entgegen und wandelt sie in High Level Anweisungen um (z.B.: Fahre mit 10km/h nach rechts). Diese Anweisung wird über einen Socket über WLAN an Programm Regelung welches auf Aufbau Regelung läuft geschickt. Programm Regelung: Läuft auf dem Raspberry Pi. Hier übersetzt du die High Level Anweisungen die vom Programm Steuerung kommen. Des weiteren kannst du dich hier jetzt austoben bzgl. der Regelung und Notausmaßnahmen. Wenn du Ein Arduino verwenden willst würde der Aufbau prinzipiell gleich aussehen, du müsstest dann irgendwie das Arduino mit dem RPI verbinden und auf am Laptop ein weiteres Arduino mit dem Laptop. -
Visual Studio C# Programm auf Bricket übertragen
Thema antwortete auf borgs Michael in: Software, Programmierung und externe Tools
Du musst ws2_32.lib noch zu den Abhängigkeiten hinzufügen, dritter Absatz hier: http://www.tinkerforge.com/de/doc/Software/API_Bindings_C.html#visual-studio -
Visual Studio C# Programm auf Bricket übertragen
Thema antwortete auf borgs Michael in: Software, Programmierung und externe Tools
Steht da nur "Fehler beim erstellen"? Oder auch irgendein Grund für den Fehler? "Dieses Projekt ist veraltet": Das heißt, dass das Erstellen des Projekts nicht geklappt hat und er nur eine alte früher kompilierte Version starten kann. -
Industrial Quad-Relay Bricklet wird nicht erkannt (NEU)
Thema antwortete auf borgs webster7567 in: Hardware
Alternativ auf "Auto update all Bricklets" klicken im Update Tab . -
Industrial Quad-Relay Bricklet wird nicht erkannt (NEU)
Thema antwortete auf borgs webster7567 in: Hardware
Hast du die Firmware schon aktualisiert? Ich vermute das es noch mit einer v1 Firmware ausgeliefert wurde. -
Visual Studio C# Programm auf Bricket übertragen
Thema antwortete auf borgs Michael in: Software, Programmierung und externe Tools
Wenn du in dem Testprogramm die UID durch die des Bricklets ausgetauscht hast und der Brick Daemon läuft (was er tut wenn der Brick Viewer funktioniert), dann musst du nur das Programm auf dem PC starten . -
Stabilste Verbindung der Wifi Extension gesucht
Thema antwortete auf borgs webster7567 in: Allgemeine Diskussionen
Es geht nicht darum zu gucken ob das eine Alternative wäre, es geht darum zu gucken ob es sich anders verhält. Wenn es sich genauso verhält wie die WIFI Extension werden wir da an der WIFI Extension keine Konfigurationen finden um die Aussetzer zu beheben. -
[Python] Callback Wert zurück geben?
Thema antwortete auf borgs christbaum in: Software, Programmierung und externe Tools
Naja, für den Fall müsstest du dann den Getter aufrufen. Alternativ kannst du in regler auch eine globale variable oder eine Klassenvariable setzen: class X: value = 0 def regler(self, x): self.value = x -
Ah, die gibts auf github: https://github.com/Tinkerforge/dc-brick/tags
-
kompilieren der Firmware -> Error
Thema antwortete auf borgs davidkoch in: Software, Programmierung und externe Tools
bricklib/utility/init.c:24:24: fatal error: pio/pio_it.h: No such file or directory Mmmmmh, in Zeile 24 steht aber eigentlich #include "bricklib/drivers/pio/pio_it.h" und nicht #include "pio/pio_it.h" Ich denke er versucht einfach den Ordner "pio/" direkt im Hauptverzeichnis zu finden, er müsste aber in "briclib/drivers/pio" suchen. Welche IDE verwendest du denn? Kann man da irgendwas bzgl. Include-Pfaden einstellen? Edit: Im Zusammenhang mit dem anderen Thread vermute ich, dass du v1.x.y Branches mit v2 Branches mischt (also bricklib v1 und master v2 oder umgekehrt). Du musst bei beiden die v1.x.y Branches nehmen: https://github.com/Tinkerforge/master-brick/tree/v1.x.y https://github.com/Tinkerforge/bricklib/tree/v1.x.y Ich würde allerdings empfehlen auf v2 umzusteigen, v1 wird nicht mehr mit neuen Features erweitert werden! -
Stabilste Verbindung der Wifi Extension gesucht
Thema antwortete auf borgs webster7567 in: Allgemeine Diskussionen
Was du probieren könntest ist der Aufbau: PC -> WLAN -> PC -> USB -> Bricks Also sprich: Der Brick Daemon läuft auf einem PC wo der Brick direkt per USB angeschlossen ist und die Kommunikation läuft über Wi-Fi von einem anderen PC aus. Verhält es sich in dem Fall anders? Bzgl. eines Checks wegen der Geschwindigkeit steht zumindest nichts im Datenblatt des Moduls. Ich könnte dir aber eine Firmware machen in dem ich die "Transmit Rate" auf einen festen Wert setze. -
I2C-Fehler beim Temp-Bricklet
Thema antwortete auf borgs jan in: Software, Programmierung und externe Tools
Echt interessant, du scheinst da ja wirklich eine störungsreiche Umgebung zu haben . Ich gucke mal ob wir das nicht schaltbar in die Firmware eingebaut bekommen. -
Stabilste Verbindung der Wifi Extension gesucht
Thema antwortete auf borgs webster7567 in: Allgemeine Diskussionen
Ich denke die beste Lösung für so ein Projekt ist es, ein kleines Embedded Board (Raspberry PI, BeagleBoard o.ä.) mit auf die Seilkamera zu bringen und die eigentliche Regelung machen zu lassen. D.h. du schickst eine "High-Level Anweisung" per Wi-Fi an das Embedded Board (fahre 10m nach links mit 20km/h) und das Embedded Board macht die eigentliche Regelung. Eine Regelung über Wi-Fi wird nie Echtzeitanforderungen genügen, also nie eine definierte minimale Paketlaufzeit haben. Welche Verbindungsart theoretisch am stabilsten sein könnte kommt sicherlich auf das verwendete Equipment an. Wenn ein AP mit sehr hoher Sendeleistung verwendet wird, kann es denke ich durchaus sein dass eine Verbindung stabiler ist als direkt AdHoc. -
http://download.tinkerforge.com/firmwares/
-
Also geplant ist sowas, das wird aber noch lange dauern. Ist relativ weit hinten in der Neue-Hardware-Liste. Im Moment tendieren wir aber dazu ein NFC-Bricklet zu machen, das scheint sich ja jetzt in Mobiltelefonen durchzusetzen usw. Vielleicht wäre NFC für ein Zugangssystem auch besser geeignet. Das ist auf Sicherheit ausgelegt und man könnte dann auch Zugang über Handys erlauben: http://www.fakir.it/aktuelles/detail/items/unterschied-rfid-und-nfc-eine-kurze-erklaerung.html