



borg
Administrators
-
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von borg
-
Das hängt ein bisschen davon ab wie viel Platz du hinter der Wallbox hast. Die Löcher hinten haben das gleiche Durchmesser und Gewinde wie die Löcher unten, nur per Default ein Blindstopfen . Du kannst also hinten den Blindstopfen rausschrauben, ihn unten reinschrauben und die Zugentlastung von unten nach hinten schrauben. Allerdings gibt es oft sehr wenig Platz in der Wand, viele Elektriker ziehen daher das Kabel einfach durch das Loch und machen es dann mit einer Dichtmasse dicht.
-
Ja
-
Plug & Charge ist an der Stelle nicht relevant, das wird erst ausgehandelt wenn die ISO15118-Verbindung schon lange steht.
-
Ich kann das Verhalten mit unserem IONIQ5 bestätigen. Wenn wir nur DC laden auf max 80% stellen und dann das Auto über 80% Ladestand hat, spricht es kein ISO 15118. Was natürlich dumm ist, da man in Theorie auch direkt über die ISO15118-2 per AC laden könnte...
-
Ooooh, das macht sehr viel Sinn und kann ich hier auch testen.
-
Ist auf jeden Fall sehr komisch. Wenn es ein generelles Problem ist würde ich erwarten dass du an einer DC-Säule aktuell auch nicht laden kannst. Du könntest aktuell nur schauen ob es irgendein Zusammenhang mit irgendwas gibt wann die ISO 15118-Kommunikation funktioniert und wann nicht (wenn du sagst manchmal geht es und manchmal nicht). Da wir Ioniq5 hier haben werde ich damit nochmal ausführlich testen und mich dann nochmal melden, dauert allerdings ein paar Tage bis ich dazu komme.
-
Jo, der Ioniq5 hat wieder nichts von sich gegeben. Ich kann kommende Woche schauen ob ich das irgendwie reproduzieren kann. Ich hab zwei Ioniq5 hier mit denen ich testen kann. Bisher hab ich das verhalten aber noch nicht gesehen.
-
Nein das ist nicht möglich. Ganz am Anfang der ISO 15118-Kommunikation wird das SLAC-Protokoll gesprochen (Signal Level Attenuation Characterization). Die Wallbox horcht dabei und das Auto sendet die ersten Signale. Ich kann im Protokoll sehen dass der Ioniq5 heute morgen nichts gesendet hat. Deswegen gibt es an der Stelle auch dieses ewig lange Timeout von 3x45s.
-
Ich könnte mir vorstellen dass der Ioniq5 sich gemerkt hat dass er gerade eine Ladung per PWM (ohne ISO 15118) absolviert hat und nicht gefahren ist und dann beim nächsten einstecken ohne zu fahren gar kein ISO 15118 anbietet. So sieht es zumindest aus.
-
Die Daten werden im Zweifelsfall erhoben um Sie in einer App anzeigen zu können, da die Käufer der PV-Anlage gerne sehen möchten was gerade eingespeist wird.
-
Es gibt in der WARP4 aktuell keine Software zur Steuerung des Motors einer Verriegelung von einer Typ 2-Dose und auch keinen integrierten Motortreiber. Es gibt auf dem EVSE der WARP4 IO die dafür vorgesehen ist, allerdings ist das darauf ausgelegt den eigentlichen Motortreiber (und auch die Stromversorgung für den Verriegelung) extern zu haben und nicht in der Box.
-
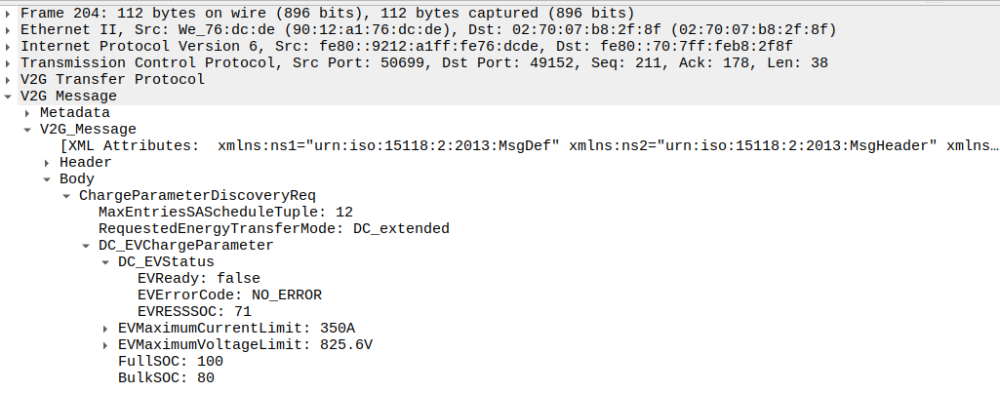
Also die letzte ISO 15118-Kommunikation in dem Log war gestern um 10:34 mit der MAC 90:12:A1:76:DC:DE und das Auto hat einen SoC von 71 zurück gegeben: Dann wurde heute um 09:54 ein Auto angesteckt, dieses hat aber kein ISO 15118 angeboten. Hast du den Ioniq5 gestern Abend abgesteckt und heute morgen wieder angesteckt ohne gefahren zu sein?
-
Mh, also im Debug-Report steht ein State of Charge von 71%. Der wird im Webinterface nicht angezeigt?
-
Ich hab es mir in der Zwischenzeit genauer angeschaut und der SoC über die API ist definitiv auslesbar auf dem ESP32, aber für den Nutzer leider kompliziert das einzurichten. Um an den client_id und refresh_token zu kommen muss man diese Schritte ausführen: https://www.myteslamate.com/de/blog/tesla-api-anwendung-registrierung/ Das hatte ich mir etwas einfacher vorgestellt. Was meint ihr? Ist das als "Advanced-Feature" für die Leute die das machen wollen noch im Rahmen?
-
Kannst du die Wallbox denn irgendwie an der Tragkonstruktion verschrauben oder geht es an der Stelle wo sie hin soll nur an den Paneelen direkt? Eine mögliche Vorgehensweise bei sowas ist das man eine große stabile "Lastverteilungsplatte" mit vielen Schrauben an der Wand befestigt und dann die Wallbox auf diese Platte hängt. Damit das Gewicht der Wallbox auf eine möglichst große Fläche verteilt wird.
-
Kannst du das debug log anhängen im Forum oder an info@tinkerforge.com schicken?
-
Wenn das robust ginge, könnten wir auch zwischendurch das Laden stoppen und nochmal den SoC auslesen und wieder starten um den SoC fortzuführen. In der Praxis ist es so dass bei ISO 15118 immer das Auto ein Request schickt und die Wallbox darauf ein Response. Die Wallbox kann daher leider nie von sich aus eine ISO 15118-Kommunikation starten (wenn das ginge wäre vieles einfacher). Wenn du nach Ladeende immer 1-3% unter dem SoC liegst kannst du aber auch einfach die konfigurierbare Effizienz verringern um genauer an den Wert zu kommen oder nicht?
-
ist egal.
-
Ich befürchte solange sich das selbst nicht irgendwie wieder fängt ist das nicht mehr zu retten. Edit: Und lad nach dem Neustart auch den Debug-Report einmal runter.
-
Mh, kannst du die ganze Box einmal vom Strom trennen und wieder verbinden (also so, das auch der Zähler vom Strom getrennt wird. Nicht nur den ESP neustarten)?
-
Kommst du an einen Debug-Report nach dem Versuch mit dem BYD Dolphin? Wäre für uns interessant zu sehen was passiert.
-
Ist inkl. Kabel.
-
Blogeintrag: WARP4 Charger: Jetzt Geprüft nach OVE-Richtlinie R 37 Aktualisierte Konformitätserklärung: WARP4 Konformität
-
11kW: 10,75kg, 22kW: 13,75kg Da schaust du am besten in den Bohrplan: https://warp-charger.com/documents/WARP4_Bohrschablone.pdf Der Energy Manager kann die Daten aller Zähler langfristig lokal aufzeichnen und zusätzlich Wärmepumpen/Heizungen per SG-Ready-Signal steuern. Wenn du beides nicht benötigst, benötigst du keinen Energy Manager. Das bringt gar nicht, in der WARP4 können L2/L3 schon weggeschaltet werden um 1-phasiges Laden zu erzwingen.
-
So, hab jetzt alle Möglichkeiten durchgetestet und leider mittelmäßig schlechte Neuigkeiten. Autocharge funktioniert problemlos mit Tesla, den SoC können wir zwar auslesen, allerdings ist es nicht möglich direkt danach eine AC-Ladung zu starten 😕. Man kann in dem Zustand dann händisch in der App die Ladung starten, aber die Wallbox hat keine Chance selbst die Ladung zu triggern. Der Tesla ignoriert an der Stelle jegliche Form von Wakeup. Zwei Möglichkeiten: Wir können auf die ISO15118-20 warten, dort ist SoC auslesen und Laden gleichzeitig vorgesehen. Bei Tesla kommt man aber auch hinreichend einfach über die Cloud an den SoC. Es wäre denkbar das auf dem ESP32 des WARP4 zu implementieren. Das hat dann aber natürlich zusätzlichen Konfigurationsaufwand (Vehicle ID und "Tesla Partner Token" müsste man dafür eintragen).

