Harry Fast
-
Gesamte Inhalte
10 -
Benutzer seit
-
Letzter Besuch
Harry Fast's Achievements
")
Newbie (1/14)
0
Reputation in der Community
-
Skalierung Accelerometer 2.0 Bricklet
Thema antwortete auf Harry Fasts Harry Fast in: Allgemeine Diskussionen
Okay das leuchtet ein. Da ich die Daten aber als Gleitkommazahl ablege sollte das dann keinen Unterschied machen. Danke für die Rückmeldung! -
Skalierung Accelerometer 2.0 Bricklet
Thema antwortete auf Harry Fasts Harry Fast in: Allgemeine Diskussionen
Vielen dank für die schnelle Rückmeldung. Eine weitere Frage habe ich noch. In der Dokumentation wurde noch ein Text hinzugefügt. Da wird empfohlen, dass man für eine FFT die AD-Wandler-Werte nehmen sollte. Leider habe ich noch nicht ganz verstanden warum das empfohlen wird. Könnten sie mir dazu vielleicht eine kurze Rückmeldung geben? Vielen Dank. -
Skalierung Accelerometer 2.0 Bricklet
Thema antwortete auf Harry Fasts Harry Fast in: Allgemeine Diskussionen
Wenn ich folgenden Code verwende: #!/usr/bin/env python # -*- coding: utf-8 -*- HOST = "localhost" PORT = 4223 UID = "HBp" # Change XYZ to the UID of your Accelerometer Bricklet 2.0 data_rate = 13 full_scale = 0 enable_x = True enable_y = True enable_z = True resolution = 1 from tinkerforge.ip_connection import IPConnection from tinkerforge.bricklet_accelerometer_v2 import BrickletAccelerometerV2 # Callback function for acceleration callback def cb_acceleration(RawSensorData): print(RawSensorData) #print("Acceleration [X]: " + str(x/10000.0) + " g") #print("Acceleration [Y]: " + str(y/10000.0) + " g") #print("Acceleration [Z]: " + str(z/10000.0) + " g") #print("") if __name__ == "__main__": ipcon = IPConnection() # Create IP connection a = BrickletAccelerometerV2(UID, ipcon) # Create device object ipcon.connect(HOST, PORT) # Connect to brickd # Don't use device before ipcon is connected a.set_configuration(data_rate, full_scale) a.set_continuous_acceleration_configuration(enable_x, enable_y, enable_z, resolution) # Register acceleration callback to function cb_acceleration a.register_callback(a.CALLBACK_CONTINUOUS_ACCELERATION_16_BIT, cb_acceleration) input("Press key to exit\n") # Use input() in Python 3 ipcon.disconnect() ---------------------------------------------------------------------------- Werden folgende Messwerte ausgegeben: (-48, 764, 17064, 24, 698, 17034, 211, 718, 17071, 265, 761, 17123, 256, 833, 17078, 252, 832, 17041, 79, 798, 17006, 15, 782, 16870, 88, 791, 16841, 139, 864, 16964) (78, 795, 17021, 15, 781, 16963, 70, 842, 16952, 63, 871, 16965, -43, 884, 17022, 44, 805, 17048, 203, 751, 17078, 108, 743, 17177, 12, 671, 17121, 86, 688, 17061) Muss ich bei den Einstellungen noch etwas spezielles beachten? -
Skalierung Accelerometer 2.0 Bricklet
Thema antwortete auf Harry Fasts Harry Fast in: Allgemeine Diskussionen
Hallo, Leider muss ich die Fragestellung nochmal aufgreifen. Wenn ich die Sensordaten via Python API auslese bekomme ich Werte welche (mit der beschriebenen Einheit) nicht der Erwartungshaltung entsprechen. Wenn ich z.B. nur die Erdbeschleunigung Messe bekomme ich einen Wert von ca. 17000 (Konfiguration: 16 Bit-Auflösung und 2g Messbereich) das wäre dann nach der angegebenen Berechnung 1,7g. Zu erwarten ist aber 1g. Wenn ich den Sensor via BrickViewer betreibe wird der Wert um 1,03g angezeigt. Die Berechnung geht also nicht auf. -
Accelerometer 2.0 mit RedBrick
Thema antwortete auf Harry Fasts Harry Fast in: Software, Programmierung und externe Tools
Ich bin jetzt auf einen Raspberry Pi umgestiegen. Damit klappt es jetzt. -
Accelerometer 2.0 Bandbreite und Filtereinstellungen
ein Thema hat Harry Fast erstellt in: Software, Programmierung und externe Tools
Hallo, ich nutze das Accelerometer Bricklet 2.0 und finde es super das man dank Tinkerforge diesen super Sensor (KX122) relativ einfach nutzen kann. Allerdings habe ich noch eine Frage und eine Anmerkung. Mir ist beim durchsehen des Datenblattes zu dem verwendeten Sensor (KX122) aufgefallen, dass hier zwar die beschriebene hohe Abtastung von bis zu 25,6 kHz möglich ist die Signal-Bandbreite (also die Bandbreite bis zu der der Sensor die Schwingungen mitmacht) jedoch auf 1500 Hz in Z-Richtung und 3500 Hz in X-Y-Richtung begrenzt ist. Vielleicht könnten Sie diese Information noch in der Beschreibung des Sensor mit aufführen. Zu der Frage: Welche Filtereinstellungen des Sensor werden beim Betrieb des Accelerometer Bricklet 2.0 gewählt? Wenn die Standard Filtereinstellungen gewählt werden, wird das Signal auf 1/9 der Abtastung tiefpass-gefiltert (Datenblatt KX112 Seite 45). Das ist dann bei der maximalen Abtastung ein Durchlass-Bereich bis ca 2,8 kHz. Ist es möglich die API zeitnah so zu erweitern, dass man die Filtereinstellungen selber anpassen kann? Über eine Rückmeldung freue ich mich. Viele Grüße Harry Fast -
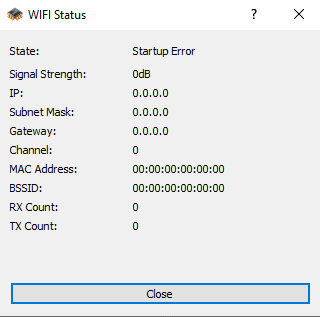
Danke für die schnelle Antwort. Leider hat das auch nicht funktioniert. Auch hier das selbe Verhalten. Der ich verbinde mich vom Rechner aus mit dem Wifi. Die Verbindung wird auch erfolgreich aufgebaut, aber nach wenigen Sec. Bricht die Verbindung wieder ab. Könnte es ein Defekt der Extension sein? Die grüne LED blinkt (drei mal kurz und dann Pause) aber nicht durchgehend.
-
Accelerometer 2.0 mit RedBrick
ein Thema hat Harry Fast erstellt in: Software, Programmierung und externe Tools
Hallo, ich will Beschleunigungswerte mittels des Accelerometer 2.0 aufnehmen. Wenn ich das Pythonprogramm dazu über den PC ausführe klappt alles super. Bei der entsprechenden Konfiguration werden ca 640 Callbacks in der Sec. verarbeitet. Was bei einer Abtastfrequenz von 6400 Hz (je Callback 10 Werte für jeweils eine Achse) plausibel ist. Wenn ich das Programm jedoch über den RedBrick laufen lasse schwankt die Anzahl der verarbeiteten Callbacks zwischen 126 und 610 Callbacks je Sec. Wenn ich dann noch andere Programmteile dazu nehme komme ich nur noch auf ca. 60 Callbacks je Sec. Ist der RedBrick da bereits an seiner Grenze? Sollte ich etwas beachten um die Performace des Programms zu steigern? -
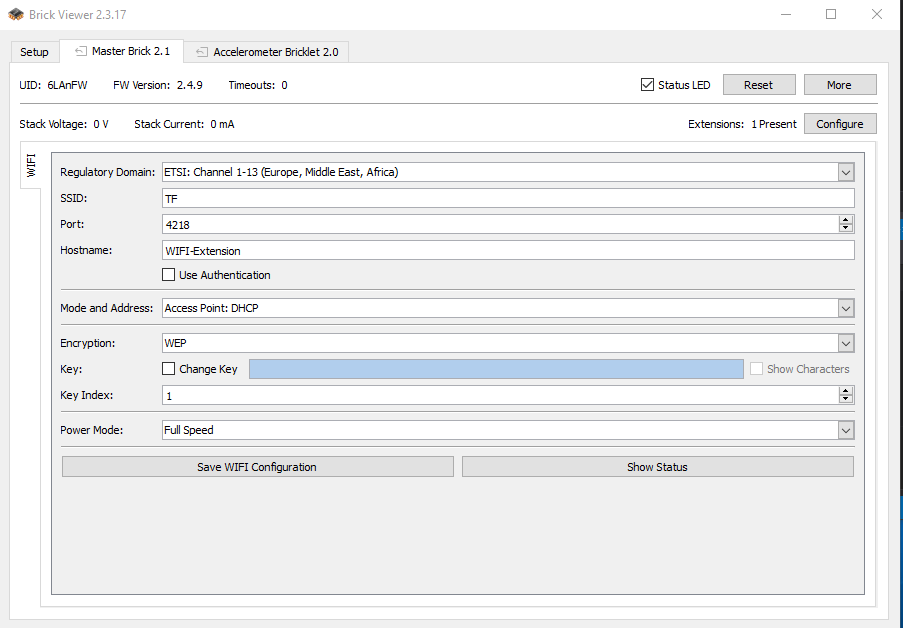
Hallo zusammen, ich versuche eine Wifi Extension 1.0 zum laufen zu bringen. Leider bleibt die WLAN Verbindung zu meinem PC nicht bestehen. Kurz nachdem die Verbindung aufgebaut wurde bricht sie wieder ab. Die Extension ist als "Access Point: DHCP" Konfiguriert. Ich habe es auch schon mit und ohne WEP Verschlüsselung versucht.

-
Hallo, ich bin gerade dabei das Accelerometer 2.0 in Betrieb zu nehmen. Dabei habe ich festgestellt, dass nach Anpassung der Auflösung (16 Bit) und der Skalierung (z.B. 8g) die Berechnung des g-Wertes (1/10000 aus der Beschreibung) nicht mehr gilt. Ich habe eine Ahnung woran es liegen könnte würde mich aber über einen Hinweis zur richtigen Berechnung freuen. Eine entsprechende Ergänzung in der Beschreibung zum Bricklet halte ich ebenfalls für sinnvoll.