AuronX
-
Gesamte Inhalte
888 -
Benutzer seit
-
Letzter Besuch
Alle erstellten Inhalte von AuronX
-
Ich vermute dein Aquarium ist von oben erreichbar. Möglicherweise reicht es dir einfach das Temperature IR Bricklet zu nehmen. Damit kannst du die Oberflächentemperatur des Wassers messen, kontaktlos! Ansonsten eintüten und besonders am Kabel aufpassen, weil das wäre die gefährlichste Stelle was Wassereintritt angeht. Die Messwerte sollte das nicht sonderlich stören. Sie könnten in einem kleinen Rahmen der Wirklichkeit hinterherhinken, weil ja das Wasser die Temperaturänderung erst an die Luft um das Thermometer abgeben muss, aber das sollte vernachlässigbar sein. Wegen "am Kabel aufpassen": Da die brickletkabel ja vieladrig sind ist es sicherlich schwierig das dicht zu bekommen... du solltest es also meiner Ansicht nach einfach einmal komplett isolieren, damit es eine glatte Oberfläche hat. Das sollte man dann leichter dichtbekommen.
-

[Aufbau] Autonomous Vehicles
Thema antwortete auf AuronXs AuronX in: Projektvorstellungen und Projektideen
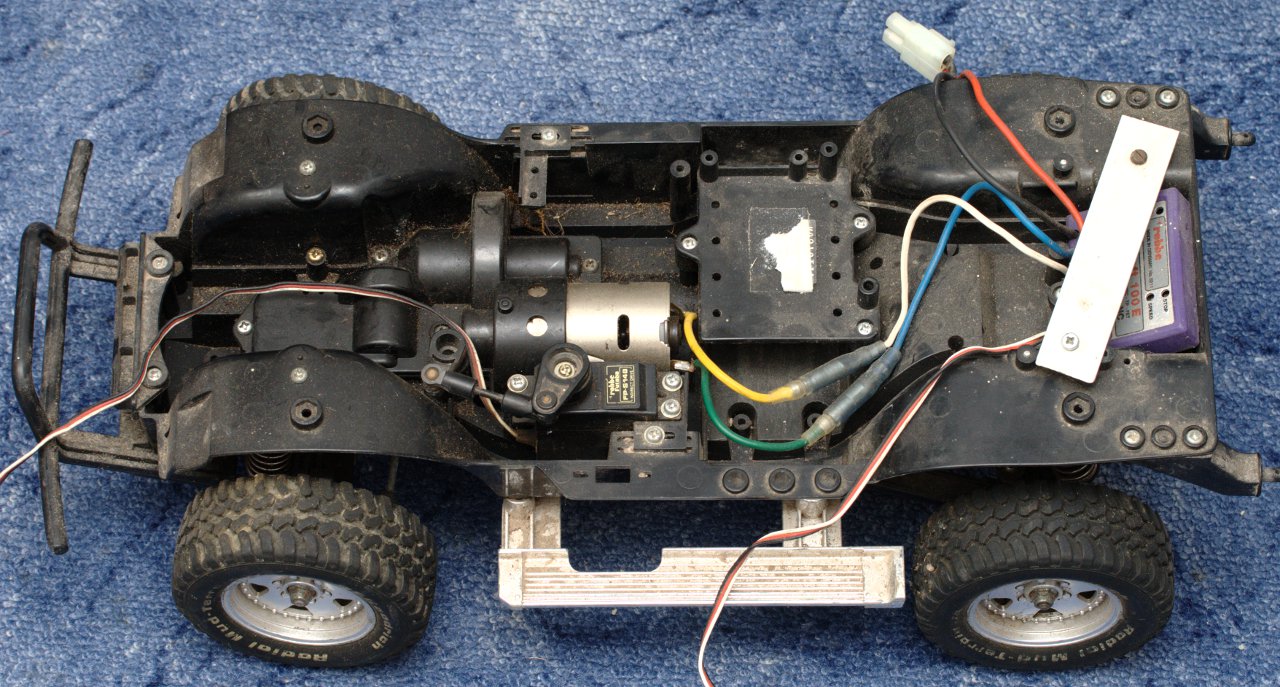
Da ich per PM schonmal nach der Stromversorgung gefragt wurde heir einfach die erten Fotos und Erläuterungen. Die Stromversorgung erfolgt über ein 7,2 V NiMH Akku wie er im Modellbau üblich ist. Da ich weder das Kabel meines ESC, noch das Kabel meines Akku zerschnippeln wollte habe ich mir einfach eine Verlängerung gebaut, von der dann eine Leitung für das Servo-Brick abgeht. Alles keine Hexerei, das kann selbst ich Wenns nochmal echte Neuigkeiten gibt mache ich vielleicht auch ein Video, aber erstmal habe ich noch andere technische Schwierigkeiten... Viele Grüße Jan
-
Die Frage ist ob es möglich ist das ganze in einem nciht gimbal-lock-freien, aber dafür einfachen Koordinatensystem anzugeben. Weil im Endeffekt geben die Quaternionen ja die neue Position des USB (oder welcher Seite auch immer) an, aber eben nur nicht eindeutig. Das heißt es gibt mehrere Varianten die gleiche Lage zu beschreiben, allerdings versteht das keiner (mich eingeschlossen) ^^ Ich weiß daher auch nicht, ob es ohne weiteres möglich ist die mehrdeutigen Quaternionen in eindeutige "gimbal-lock" Koords umzurechnen. Wäre okay, wenn es ginge, weil viele das Gimbal-Lock nicht stört.
-
Sanitycheck und Passwort fuer Bricks beim Zugriff "von aussen"
Thema antwortete auf AuronXs Loetkolben in: Allgemeine Diskussionen
Genau so wie es Loetkolben beschreibt ist es korrekt ^^ Das heißt für die Anwendung ist es noch immer halbwegs transparent. Allerdings muss sie der IPConnection den Key mitteilen, an der Stelle muss die Anwendung also bescheid wissen. -
Ich habe schonmal eine arme Programmiererin begleitet, die genau nach diesem paradigma arbeitete (da sie noch nie Objekt-orientiert arbeitete). Meine Erfahrung ist, dass das sehr schnell sehr schiefgehen kann. Zumindest wenn man es wirklich wild treibt (und das tut man schneller als man denkt ) Mein Tipp wäre es den Forms möglichst genau das zu geben was sie brauchen um ihren Job zu machen. Beispielsweise braucht i.d.R. niemand die IPConnection zu kennen, nachdem alle Bricks erstellt wurden. Die IPConnection muss nur der Programmteil kennen der Bricks drauflegt und der der die IPConnection zerstört. Die Programmteile die nur das Fahrzeug steuern brauchen Beispielsweise nur die Bricks. Am Ende hängt alles von deinem speziellen Anwendungsfall ab und es geht auf jeden Fall auch alles public zu machen. Aber versuche trotzdem im Blick zu behalten welche Klasse von wo auf welche andere zugreift, ansonsten weißt du ganz schnell nicht mehr wo oben und unten ist und bekommst komische Abhängigkeiten. Beispielsweise solltest du skeptisch werden wenn das manuelle Fahren des Roboters nur dann möglich ist, wenn auch die Stackinfo-Form existiert. Ausführliche Beschreibungen der Prinzipien für sauberen Code findet man beispielsweise hier: http://www.clean-code-developer.de/Wertesystem.ashx (Vorsicht, religiöse Einstellung gegenüber sauberem Code ^^) Ansonsten die zwei meiner Meinung nach wichtigsten Punkte: Don't repeat yourself Single-Responsibility Principle
-
C# Form Could not load type 'Tinkerforge.IPConnection'
Thema antwortete auf AuronXs JR in: Anfängerfragen und FAQ
Was meinst du mit komplett einbinden? Sie als DLL einzubinden ist doch das Mittel der Wahl. -
Wie Reset von Masterbrick per Software? brickd Logfile.
Thema antwortete auf AuronXs Loetkolben in: Hardware
Die Frage ist halt wie gut ein Reset per Software funktioniert, wenn doch die Software (bzw. Firmware) hängt... -
Naja der Bedarf ist relativ ^^ Ich machs jetzt auch durch wildes Polling, so wie ihr. Das funktioniert auch Aber:
-
C# Form Could not load type 'Tinkerforge.IPConnection'
Thema antwortete auf AuronXs JR in: Anfängerfragen und FAQ
Das Problem ist definitiv, dass er die DLL nicht findet. Wenn du mit Visual Studio arbeitest, dann musst du die zu den Referenzen hinzufügen, Visual Studio wird sie dann automatisch immer ins Verzeichnis der Anwendung kopieren. Ansonsten einfach selbst zur Anwendung kopieren. -
Bin nur ich das oder fehlt das "folgende"?
-
Hmmm, habe ich bisher nicht drüber nachgedacht aber könnte stimmen. Sollte ich beachten. @The_Real_Black: Ich habe XNA installiert und Managed DX bisher nicht kennengelernt. Allerdings habe ich XNA bisher auch nur 2D genutzt.
-
Mir ist im Brickv aufgefallen, dass er beim Anzeigen des Servo Brick Tabs die Status-LED meines Bricks zum wilden flackern bringt. Später ist mir aufgefallen, dass der Servo-Brick keine Callbacks für ExternalVoltage, StackVoltage usw. bietet (abgesehen vom LowVoltage-Callback). Auch Callbacks für den fließenden Strom fehlen (Servo- und OverallCurrent). Ich vermute also, dass auch der Brick Viewer aus diesem Grund auf wildes Polling setzt. Gibt es einen technischen Grund diese Callbacks auszulassen oder wurden sie schlicht vergessen? Viele Grüße Jan
-
[Servo-Brick] Umkehrung von min und max möglich?
Thema antwortete auf AuronXs AuronX in: Software, Programmierung und externe Tools
Okay danke! Solange komme ich auch mit umgedrehter Logik zurecht ^^ -
Sieht schick aus ^^ Hab direkt mal die Output Voltage beim Servo Brick gecheckt 2V bis 9V... so soll es sein
-
Da würde ich es nicht mehr im freien verwenden, da es ja eine Reichweite von 2km hat. Grundsätzlich kenne ich die betreffenden Paragraphen aber nicht und kann dir deswegen keine qualifizierte Auskunft geben, ab wann du es benutzen darfst und wie lange nicht.
-
Ich meine irgendwo mal gelesen zu haben, dass ein Master Brick ganz unten im Stack sein muss. Habe aber auf die schnelle nur den Hinweis gefunden, dass bei mehreren Master Bricks nur das unterste Master ist. Also ich denke es ist gewollt, dass das Master Brick ganz unten sein muss. Belegen kann ich es aber gerade nicht
-
Nutzbare Frequenzen: http://www.bundesnetzagentur.de/cln_1911/DE/Sachgebiete/Telekommunikation/RegulierungTelekommunikation/Frequenzordnung/Frequenznutzungsplan/FreqNutzungsPlan_Basepage.html Ist jetzt mal ne ausführliche Liste Demnach würde ich denken, dass die 915 MHz beispielsweise für militärische Anwendungen vorbehalten ist. Leider sehe ich gerade nciht auf welchen Frequenzen die höheren Kanäle des "BPSK40 915Mhz" liegen. Diese könnten möglicherweise in den Bereich ab 918 MHz fallen, dort wäre das Funken erlaubt solange keine Bahnschienen in der Nähe sind. (dort nutzt die DB nämlich GSM-R)
-
[Python] Was tun gegen zu viele Callbacks?
Thema antwortete auf AuronXs Plenz in: Software, Programmierung und externe Tools
Nein. Das Observer-Pattern beinhaltet ja das aktive rufen der Update-Methode durch das beobachtete Objekt. Dies entfällt hier. 1. Grund: Dadurch, dass es einfach ständig Änderungen gibt, lohnt es sich nicht CPU-Zeit sparen zu wollen, indem man nur veränderte Bilder zeichnet 2. Grund: Es soll ja eh entkoppelt werden, das rendern der GUI soll also nicht bei jedem Update passieren. Das heißt man würde in der Update-methode bestenfalls ein "hasChanged"-flag auf true setzen. Vom Observer ist also nur der Teil übrig, dass ein Objekt sich auf den Zustand eines anderen bezieht ^^ Im Endeffekt geht es hier nur um die grundlegende Trennung von Model und View, dazu siehe auch den (umfangreichen) Model View Controller. -
Vermutlich alle die drauf anspringen... Ich bin auch gespannt was beim nächsten Update passiert ^^
-
[Servo-Brick] Umkehrung von min und max möglich?
ein Thema hat AuronX erstellt in: Software, Programmierung und externe Tools
Hallo, habe jetzt das erste Mal tatsächlich einen Servo an meinem Brick zu hängen. Habe bisher im Uhrzeigersinn gedacht, also dass bei geringster Pulsweite der servo anch links dreht und bei maximaler nach rechts. Mein Servo tut das Gegenteil. Ich weiß nicht ob das von Servo zu Servo anders ist oder nicht, aber es wäre toll, wenn ich schon frühzeitig alle Servos "gleichsetzen" kann. Eine RC-Fernsteuerung von mir hatte beispielsweise Invertierungsschalter um genau das zu erreichen. Mein erster Versuch war es per SetDegree als min 9000 und als max -9000 zu vergeben, in der Hoffnung, dass dann die Ansteuerung gedreht erfolgt. Das hat leider nicht geklappt. Ist so etwas vorgesehen? Oder muss ich das selbst bauen? -
Zu dem letzten Fahrzeug kann ich sogar noch Senf geben: Das ist der Nach-nach-nachfolger eines Bausatzes, den ich mein Eigentum nennen darf ^^ Das ist quasi der Einsteiger-Bausatz von Tamiya. Ich hätte meinen Fighterbuggy fast selbst als Chassis benutzt, habe mich dann aber für den anderen entschieden, weil ich dort mehr Grundfläche zum Bauen habe. Der super-fighter sollte aber auf jeden Fall für den Servo-Brick geeignet sein, weil dort auf jeden Fall "echte" RC-Servos benutzt werden. Beim Fahrtenregler musst du schauen ob er BEC hat, also ob er den angeschlossenen Empfänger (bei dir der TF-Stackk) mit Strom versorgt. Falls ja musst du dort den mittleren (roten) Kabel entfernen.
-
Ich befürchte da reagiert der Scanner einfach nur über. DeepScan deutet ja auf eine Heuristik hin ("DeepScan" klingt einfach besser als "Guessed"). Nun ist eine Anwendung natürlich verdächtig, wenn sie direkt USB-Devices nutzt und Netzwerkverbindungen aufbaut, damit ließe sich sicherlich schnell ein Keylogger bauen ^^ Eine meiner Anwendungen die Tastatureingaben per Global-Hook gelesen hat ging halt auch per Heuristik als Keylogger durch. Klar... sie wäre ja auch dazu geeignet gewesen, wenn der Code etwas verändert würde ^^ Lösungsmöglichkeiten: Für den User: - Heuristik-Niveau senken - Ausnahme hinzufügen Für TF: - Hersteller des AV kontaktieren und Fragen wie man da vorgeht
-
Sanitycheck und Passwort fuer Bricks beim Zugriff "von aussen"
Thema antwortete auf AuronXs Loetkolben in: Allgemeine Diskussionen
Habe meine Aussage auch absichtlich mit "ursprünglich" angereichert Wegen Fritzbox: Ich habe die 7390 und ehemals die 7270 im Einsatz, beide haben VPN onboard, ich glaube über IPSec, aber da lehne ich mich schon aus dem Fenster ^^ Zumindest irgendeinem externen Standard entsprechend, also nix von AVM selbst geschustertes. Kann aber durchaus sein, dass die kleineren Boxen das nicht können. Welche Fon WLAN hast du? Sollte ja auch nur eine Idee für den Fall eines "Nein" von TF sein ^^ -
Finde den Aufbau deines schwenkbaren IR-Sensors ganz cool... ich hatte für mich bisher einen flachen Aufbau im Kopf, aber das sieht auch ziemlich gut aus ^^
-
Sanitycheck und Passwort fuer Bricks beim Zugriff "von aussen"
Thema antwortete auf AuronXs Loetkolben in: Allgemeine Diskussionen
@Loetkolben: Hast du schon einen Stapel Router rumzuliegen bzw. dort wo der Einsatz geplant ist installiert? Für den Fall, dass du diese noch erwerben müsstest gäbe es grundsätzlich zwei Optionen die ohne TF-UNterstützung laufen: - Der Router kann selbst VPN (etwa Fritzboxen) - Es gibt erweiterbare Firmwares (etwa OpenWRT) für den Router, dann kannst du entweder auch dort VPN oder aber einen Wrapper für die Brick(let)s installieren (der beispielsweise eine Prise Security hinzugibt) Ich denke das Problem ist, dass die Bricks ursprünglich nicht dafür gedacht waren nackig irgendwo aufgestellt zu werden. Ich gebe dir aber recht, dass das oft die einfachste/günstigste Lösung ist, wenn man mehrere Sateliten hat.