yvo
-
Gesamte Inhalte
81 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
4
Alle erstellten Inhalte von yvo
-
Moin moin Backdraft007 Grundsätzlich könnten wir sicher über eine wasserdichte Kabeldurchführung einen Lichtleiter durchführen. Aber dann müsste ich diesen mechanisch mit dem LED-Setup des Bricklets verbinden. Was sicher auch nicht einfach ist und vermutlich mit Lichtverlust verbunden ist. Ich bin gerade eben auf die folgenden LED's gestossen: https://www.ute.de/produkte/kabel-adapter/wasserdichte-kabel-buchsen-und-stecker/wasserdichte-leds-m8-verschraubung Die würden ziemlich genau den Anforderungen entsprechen. Aber eben, da müsste ich die einzelnen LED's ansteuern. Das Ganze sitzt auf einem Raspberry-Pi mit einem Tinkerforge-HAT. Da habe ich keine GPIO mehr zur Verfügung. Mh, irgendwie tricky. Dankbar für jede Idee und Hinweis. Yvo
-
Guten Tag Forum Ich nutze das "RGB LED Bricklet" um die Benutzer über verschiedene Zustände der Applikation zu informieren. Mit dem "RGB LED Bricklet" im Prototyp funktioniert das einwandfrei. Für den "echten" Einsatz muss aber die Apparatur in einem geschützten Gehäuse untergebracht werden. Ich kann also nur kleine einzelne LED's mehr oder minder IP-66 geschützt durch das Gehäuse führen. Da wird das "RGB LED Bricklet" leider nicht mehr einsatzfähig sein. Frage: Mit welcher Tinkerforge-Technik könnte ich z.B. drei verschiedene LED's ansteuern (drei verschiedene Farben)? Freue mich auf jeden Tipp und Hinweis. Mit den besten Grüssen, Yvo
-
Yeah, I am just running a calibration of all the sensors using the diffuser and a single reference. Works well and I get the individual differences of the ambient-light sensors corrected. For this purpose, I am using a halogen-lamp dimmed by an analog-out bricklet between 0V and 12V. After each step in- or decreasing the voltage, the measured value of the ambient-light sensor is stored in combination with the voltage.
-
It is used to measure the light-distribution of different LED-spotlights within a distance of around 1m. The sensors are distributed as grid and using Python and matplotlib, the measurements are plotted as animated graph to show the light distribution. The requirement for the spotlights is an uniformly illumination as possible. The spotlights are later used for a photogrammetrical measurement setup within a cutter-head of a tunnel-boring-machine. For this reason, the illumination has to be as uniform as possible to prevent a light-concentration at the center of the images.
-
@Superp thank you very much for all the hints and ideas. Especially, the Ping-Pong-ball diffuser! That is just a great hint.
-
Hallo TinkerUnity Für die Messung der Lichteinstrahlung auf eine bestimmte Fläche werden 9 Stück AmbientLight Bricklets eingesetzt (3x3 Raster). Die Bricklets sind aber sehr stark in eine Richtung orientiert. Um dies etwas abzuschwächen, würde ich gerne jeweils einen Diffusor montieren. Mit schwebt dabei eine Halbschale vor, wie sie für übliche Belichtungsmesser oder Luxmeter verwendet werden (siehe angehängtes Bild). Frage: Trotz langer Suche habe ich keine solche Diffusoren zu kaufen gefunden. Hat jemand eine Idee oder einen anderen Ansatz dafür? Freue mich auf jeden Hinweis. Mit den besten Grüssen, Yvo

-
Hallo Chris Entschuldige meine späte Rückmeldung. Hat geklappt. Irgendwie war es zu Beginn nicht stabil. Danach problemlos. Merci, Yvo
-
Hallo Forum Eine sehr grundsätzliche Frage hinsichtlich den Möglichkeiten der WiFi-Master-Extension: Ist es möglich, die Extension als ACCESS-Point zu definieren, sich dann mit dem entsprechenden Netzwerk der Extension zu Verbinden und über BrickViewer den gesamten Setup des Stapels und aller angeschlossenen Bricklets zu sehen und zu manipulieren? Ich krieg das problemlos hin, wenn die Extension als Client in einem Netzwerk eingehängt ist. Im ACCESS-Mode kann ich mich zwar mit dem Netz verbinden, komme dann aber nicht weiter (zum Beispiel welche IP-Adresse im BrickViewer zu definieren ist). Freu mich auf jeden Hinweis. Mit den besten Grüssen, Yvo
-
Heja Das war ein perfekter Tipp. Vielen Dank. Habe es gleich ausprobiert. Mit den besten Grüssen, Yvo
-
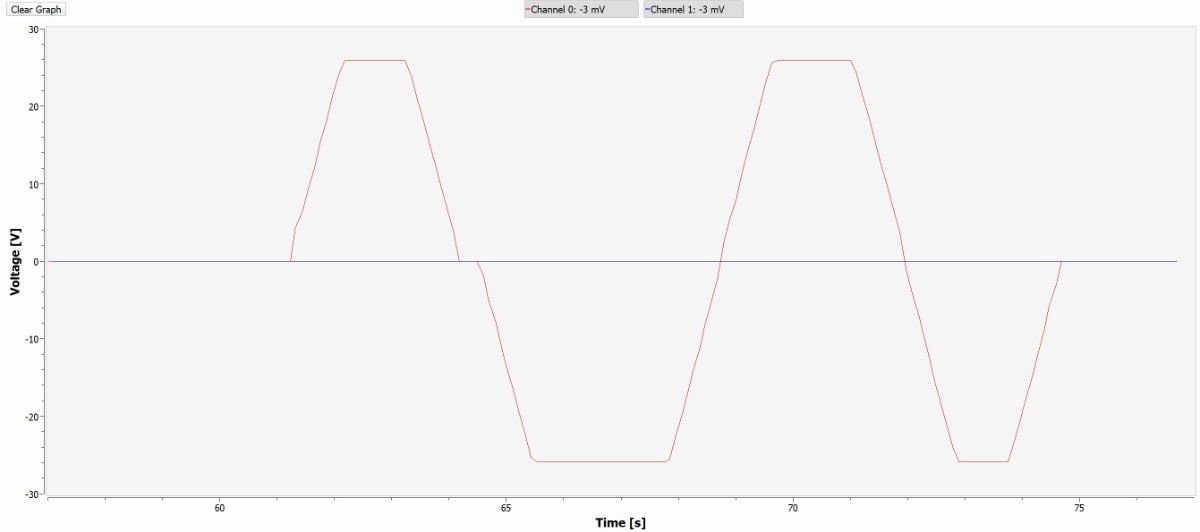
Hallo Liste Ich möchte den Ausgangsstrom und -spannung eines Motorenreglers messen können. Je nach Drehrichtung des Motor gibt der Regler einen Strom von 0 - 25V oder von 0 - -25V aus. So wie ich die Beschreibung des Voltage/Current Bricklet 2.0 ist die Verpolung zentral. Frage: Würde sowas mit dem Voltage/Current Bricklet 2.0 überhaupt gehen? Freue mich auf jeden Hinweis. Mit den besten Grüssen, Yvo
-
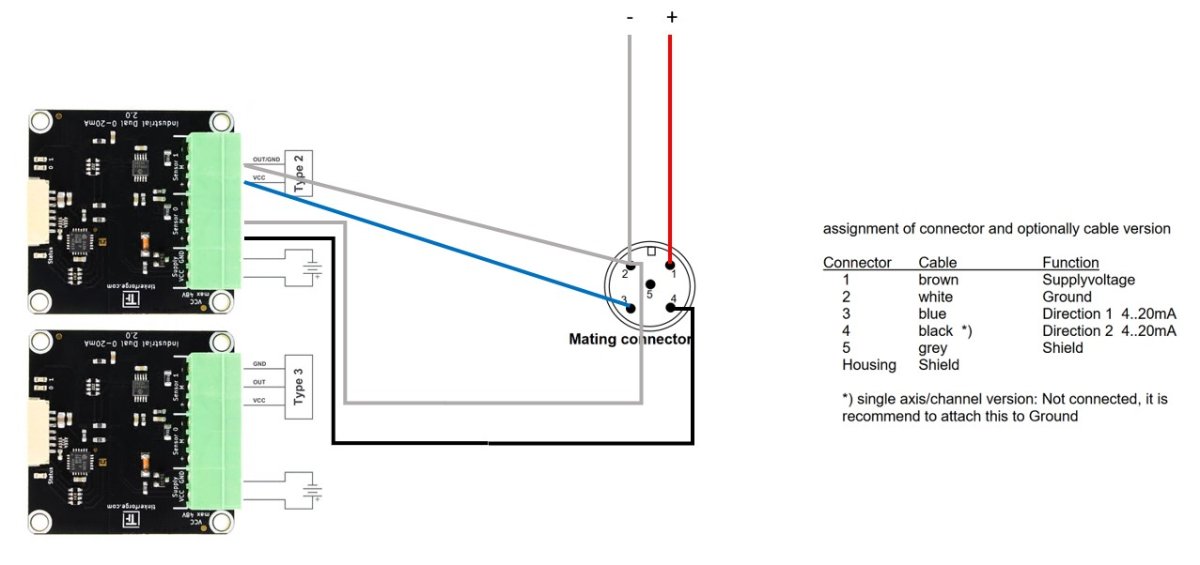
Hallo Forum Ich habe einen Neigungssensor der in zwei Achsen misst und für beide Achsen die Daten in 4-20mA zurück gibt. Der Sensor wird mit 4 Kabel verbunden: Ground Stromversorgung 24V Daten Sensor 1 Daten Sensor 2 Ich bin davon ausgegangen, dass ich die beiden Achsen mit einem "Industrial Dual 0-20mA Bricklet" auslesen kann und habe diese wie im angehängten Bild angeschlossen. Leider konnte ich aber keinen Strom messen. Frage: Habe ich grundsätzlich etwas nicht verstanden und mit diesem Bricklet kann ich diese Aufgabe gar nicht lösen? Oder muss ich zwingend die 24V-Stromversorgung auch über das Bricklet führen (hinsichtlich Ground)? Freue mich auf jeden Hinweis von Eurer Seite. Mit den besten Grüssen, Yvo
-
Perfekt. Ganz herzlichen Dank für die ausführliche Rückmeldung. Gruss, Yvo
-
Hallo Forum Ich habe Sensoren, welche die Messdaten über RS485 zu Verfügung stellt. Die Sensoren selber werden zwischen 10 und 30 Volt betrieben. Die Sensoren selber haben einen üblichen 4-poligen Sensorstecker (V, Gnd, Tx, Rx). Die Daten möchte ich über ein RS485-Bricklet auslesen. Respektive andere Sensoren mit RS232-Anschlüssen über RS232-Bricklets. Frage: Wie muss ich den Sensor und das Bricklet verbinden? Die beiden Kabel Rx und Tx von Sensor entsprechend auf Bricklet. Die beiden Kabel V und Gnd von Sensor auf eine externe Stromversorgung. Und muss ich den Gnd vom Sensor auch mit dem Gnd des Bricklets verbinden. Freue mich auf jeden Hinweis. Gruss aus der tief verschneiten Schweiz, Yvo
-
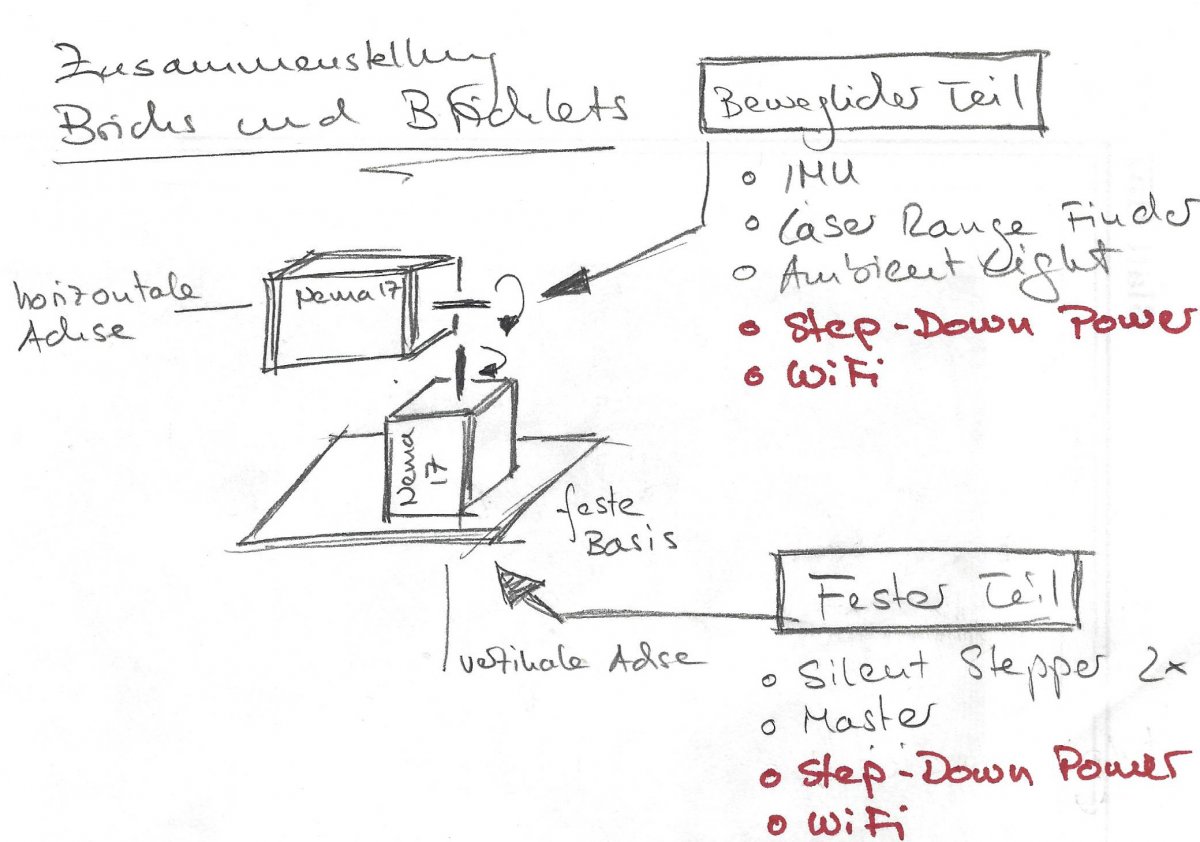
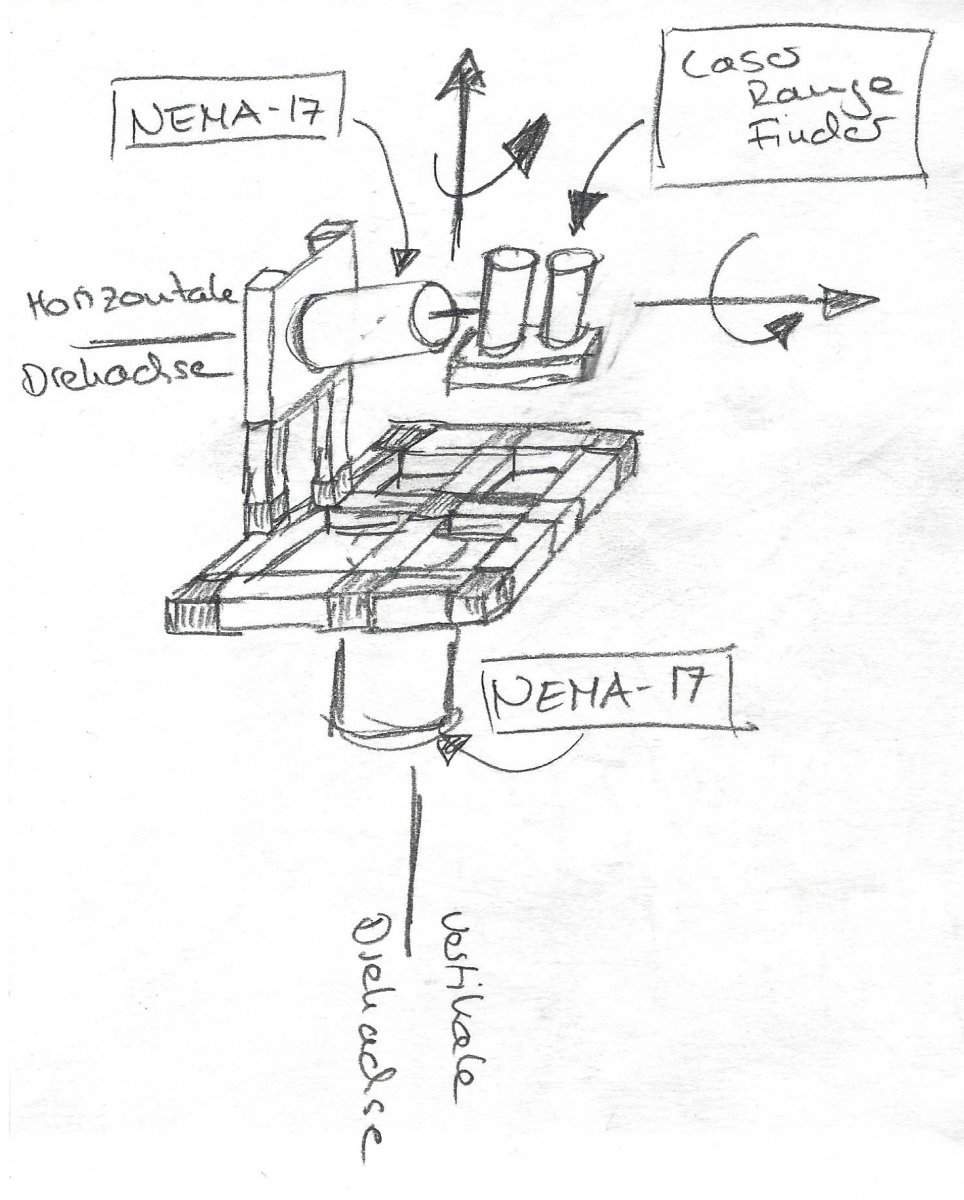
Salut Photon Ich habe versucht, die Anwendung grob in der beiliegenden Skizze zu dokumentieren. Fester Teil: Hier sind die zwei Silent-Stepper für die beiden Nema-17-Motoren. Diese sind aktuell über einen Master via USB an einem Rechner angeschlossen. Die Silent-Stepper werden jeweils noch extern mit Strom versorgt. Beweglicher Teil: Hier sind die Sensoren zu Hause. Eine IMU, einen Laser-Range-Finder und ein Ambient-Light. Die sind alle über einen Master und via USB an einem Rechner angeschlossen. Anforderungen: Das Ganze soll möglichst via drahtlos (WiFi) angesteuert werden können. Ein Kabel für die Stromversorgung zum beweglichen Teil macht kein Problem. Aber sonst sollte die Anzahl Kabel möglichst klein sein zwischen festem und beweglichem Teil. Idee: Beide Stapel (auf dem festen und auf dem beweglichen Teil) je mit einem Step-Down-Power-Supply mit Strom versorgen. Auf beiden Stapel je ein WiFi-Modul integrieren. Das WiFi-Modul auf dem Stapel im festen Teil als Master definieren und mit dem WiFi auf dem beweglichen Teil ein Mesh bilden. So mit einer IP-Adresse beide Stapel ansprechen. Was meinst Du? Ich hatte mit Teddy schon eine Diskussion hinsichtlich der Ausgestalltung der festen und beweglichen Teile in diesem Thread. Dort hat es auch zwei Skizzen zum Bauprojekt, einfach hinsichtlich den mechanischen Teilen.
-
Hallo photron Vielen Dank für die schnelle Rückmeldung. Mh, das ist nicht ganz mein Ziel. Das Ganze soll möglichst unabhängig von USB-Kabel funktionieren. Entweder mit RED-Brick gesteuert, oder via WiFi-Brick von einem Handheld aus. Frage: Könnte ich dann dem IMU-Brick ein weiteren WiFi-Brick aufstecken und dann die zwei Elemente per Mesh verbinden? Das könnte sogar noch den positiven Aspekt haben, dass ich nur eine Stromversorgung in den beweglichen Teil führen muss und keine Datenkabel.
-
Guten Tag Ich habe eine Vorrichtung in der Mache, welche aus zwei Teilen besteht: fester Teil -> Hier kommt die Elektronik mit Master-Stapel, Stromversorgung, usw. hin. beweglicher Teil -> Hier kommen Bricklets hin, welche messen und mit Kabel am Master-Stapel verbunden sind. Jetzt brauche ich aber am beweglichen Teil ein IMU-Brick um die Auslenkung zu messen. Problem: Das IMU-Brick kann ich ja nur mit einem Master-Brick verwenden. Das / Die Master-Brick sind aber im festen Teil untergebracht. Den Master-Stapel kann ich aber nicht in den beweglichen Teil verlegen (diverse Gründe). Meine Frage: Wie kann ich den kleinen Stapel (ein Master- und ein IMU-Brick) mit dem grossen Master-Stapel verbinden? So dass alles über eine Programmierschnittstelle anzusprechen ist. Freue mich auf jeden Hinweis. Mit den besten Grüssen, Yvo
-
Krass, das ist ja supercool. Ganz herzlichen Dank. Dann würde ich zwei solche Kupplungen bestellen und kaufen. Muss ja eh noch eine ganze Menge Zeugs für dieses Projekt bestellen. Dies kann ich aber erst über das Wochenende machen. Frage: Ist es in Ordnung, wenn ich im Laufe der nächsten Tage die Bestellung bei Euch im Online-Shop mache und in einer Bemerkung auf unsere Korrespondenz hinweise? Freu mich auf Deine Rückmeldung. Mit den besten Grüssen, Yvo
-
Ah, das ist natürlich völlig richtig. Das ging mir durch die Lappen. Aber der Vorschlag von Dir passt gut. Hat sogar den Vorteil, dass jetzt die Kupplung in der Mitte mehr Material haben kann. Was vermutlich nicht schlecht ist für die Stabilität, oder?
-
Salut Teddy Das wäre natürlich sehr cool, nimmt mich wunder und freu mich. Ja, das mit der Unwucht sollte kein Problem sein. Die vertikale Achse dreht verhaltnismässig langsam. Die obere horizontale Achse ist dann etwas schneller unterwegs, aber dafür ist die Last sehr viel kleiner. Gruss aus der Region Zürich, Yvo
-
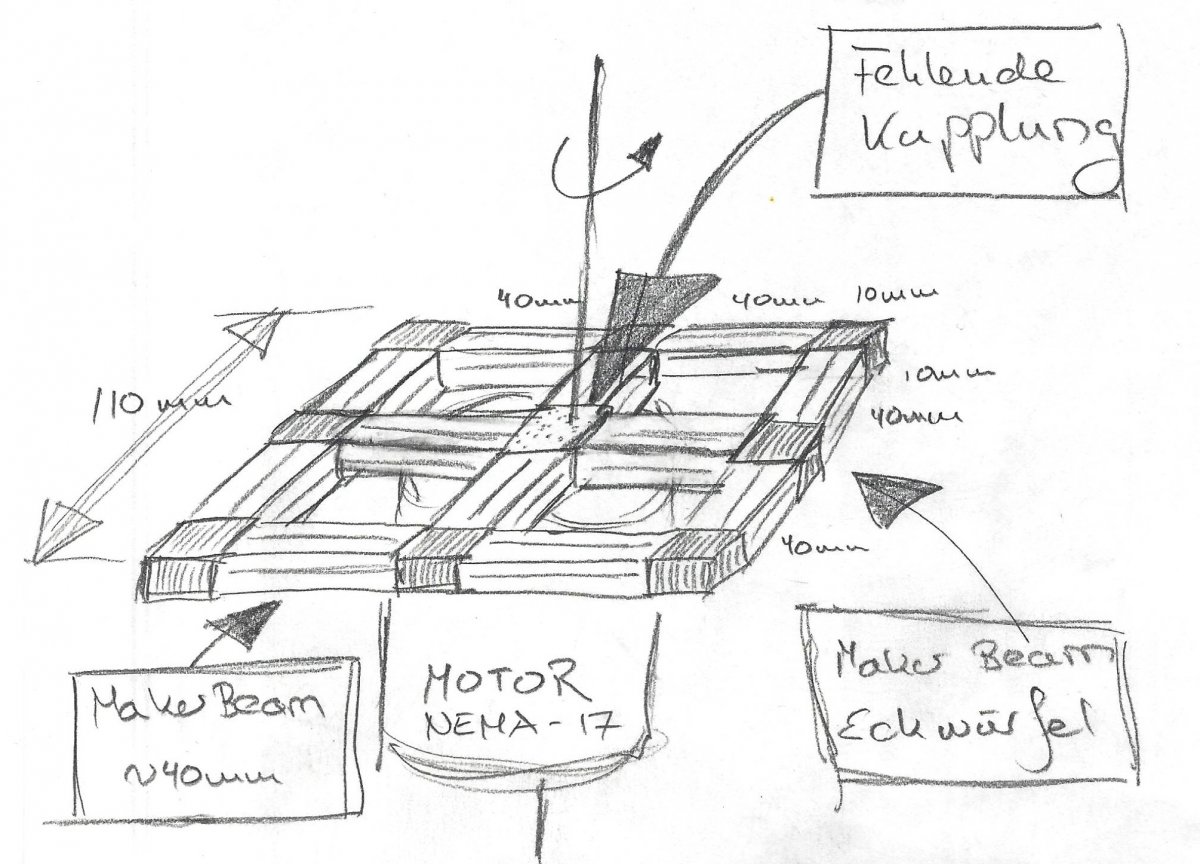
Salut Teddy Merci für die Rückmeldung. Ja, etwa so wie Du das skizzierst wäre der Plan. Ich habe versucht, die Ideen zu skizzieren und hab sie dem Thread angehängt. Grundsätzlich bräuchte ich einen Raumscanner welcher einen RangeFinder um zwei Achsen dreht. Wenn ich alles mit MakerBeams bauen würde, ist aber nur sehr wenig Luft für eine entsprechende Kupplung (konkret 10 x 10 mm um mit den MakerBeam-Eckwürfel zu korrespondieren). Bin mir allerdings gerade nicht sicher, ob diese Grundidee überhaupt funkktionieren würde. Die Last auf der vertikal stehenden Achse des unteren NEMA-17 wäre doch ziemlich beachtlich. Unter Umständen muss ich da mit einem Riehmenantrieb arbeiten. Was meinst Du? Mit den besten Grüssen, Yvo
-
Guten Tag Liste Ich habe eine Frage hinsichtlich dem Aufbau eines rotierenden Messkopfs. Diesen würde ich gerne mit zwei Nema-17 Moteren realisieren: 1 Motor für die Rotation eines Aufsatzes (gebaut mit MakerBeams) um die Vertikalachse. 1 Motor auf dem rotierenden Aufsatz für eine weitere Bewegung. Gibt es eine Achskupplung, auf welcher ich 4 MakerBeams (je ein Beam in die 4 Richtungen) montieren kann? Freue mich auf jeden Hinweis, Yvo
-
Netzwerkzugriff via Ethernet-Extension und RED
Thema antwortete auf yvos yvo in: Anfängerfragen und FAQ
Heja Cool. Vielen Dank für die schnelle Rückmeldung. Mit den besten Grüssen, Yvo -
Netzwerkzugriff via Ethernet-Extension und RED
ein Thema hat yvo erstellt in: Anfängerfragen und FAQ
Guten Tag Liste Ich habe eine ziemlich grundsätzliche Frage was die Ethernet-Extension angeht: Ich müsste auf dem RED einige Programme laufen lassen, welche das lokale Netzwerk benötigen (Zugriff auf Datenbank, Shares, ...). Wenn ich die Ethernet-Extension richtig interpretiere, kann ich dieses auf das RED setzen und mit den üblichen Netzwerk-Methoden (Python) auf mein lokales Netzwerk zugreifen. Ist das richtig? Und ist es auch richtig, dass ich dann via den BrickViewer und der entsprechenden Adresse der Ethernet-Extension auch den RED sehe und konfigurieren kann? Freue mich auf jeden Hinweis. Mit den besten Grüssen, Yvo -
Hallo Liste Ich habe über ein Master-Brick zwei Voltage/Current-Bricklet angeschlossen. Das Master-Brick hängt direkt mit USB am Rechner. Dies hat problemlos funktioniert und ich bin mir keinem Fehler bewusst. Alles ist verpolungssicher aufgebaut. Jetzt sehe ich aber nur noch ein Voltage/Current-Bricklet. Habe die Kabel und die Steckplätze vertauscht, konnte aber das zweite Voltage/Current-Bricklet nicht mehr zum Leben erwecken. Frage: Gibt es eine Methode, wie ich prüfen kann, ob ein Bricklet tot ist? Die Voltage/Current-Bricklet haben keine LED's zur Überprüfung. Freue mich auf jeden Hinweis. Mit den besten Grüssen, Yvo
-
Verständnisfrage Callback mit Python bei AnalogIn
ein Thema hat yvo erstellt in: Anfängerfragen und FAQ
Hallo Forum Ich habe ein grundsätzliches Verständnisproblem bei der Callback-Funktion des AnalogIn 2.0: Als Start habe ich das Threshold-Beispiel genommen https://github.com/Tinkerforge/analog-in-v2-bricklet/raw/master/software/examples/python/example_threshold.py und leicht angepasst: ai.set_voltage_callback_threshold("i", 5*1000, 20*1000) Nach meinem Verständnis sollte immer die Callback-Funktion aufgerufen werden, wenn die Spannung zwischen 10 und 20 Volt zu liegen kommt. Ich wechsele die Spannung am Bricklet zwischen 0 und 15 Volt. Im BrickViewer wird alles korrekt ausgegeben. Im Python-Code passiert aber nichts. Die Callback-Funktion erscheint nicht sofort. Erst nach dem drücken einer Taste werden einige Zeilen mit den Volt ausgegeben. Kann mir jemand einen Hint geben? Das wäre super. Mit den besten Grüssen, Yvo